Machine Design
We had a meeting to discuss what we are going to do in the machine design group project.
Some ideas were tossed around. we had to choose between a plotter, Foam cutter or a CNC. We settled on fabricating a plotter.
Abdullatif suggested that we try a new mechanism. He saw a polygraph displayed at Maker Faire Cairo 2016 and suggested that we modify it a bit.
So polygraph uses gravity to pull the pen downwards and two motors are used to direct the pen to the left and right. What Abdullatif suggested was to design a mechanism that do this horizontally and compensate for the gravity using springs attached to a plate that goes right and left on a belt.
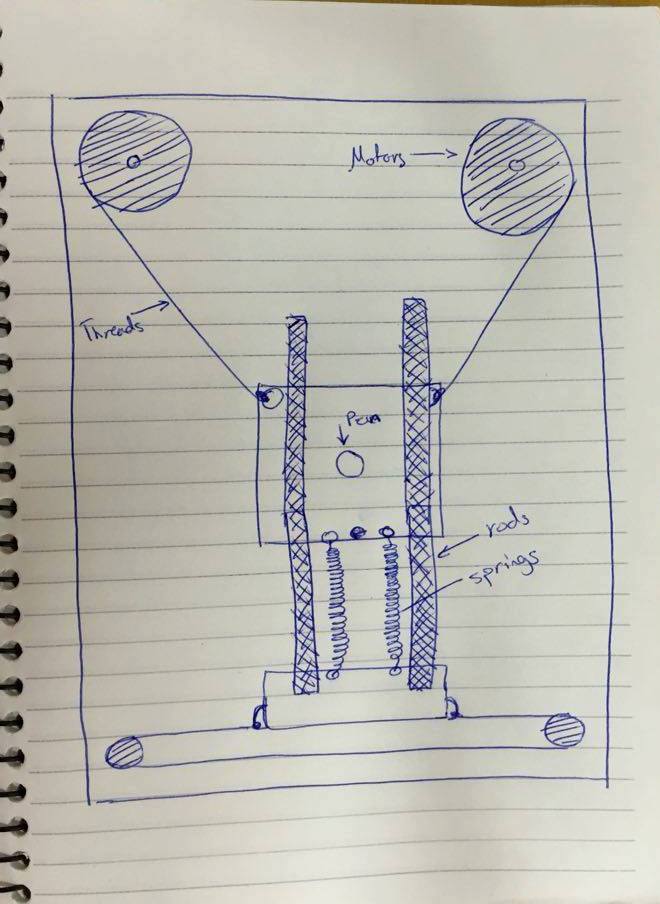
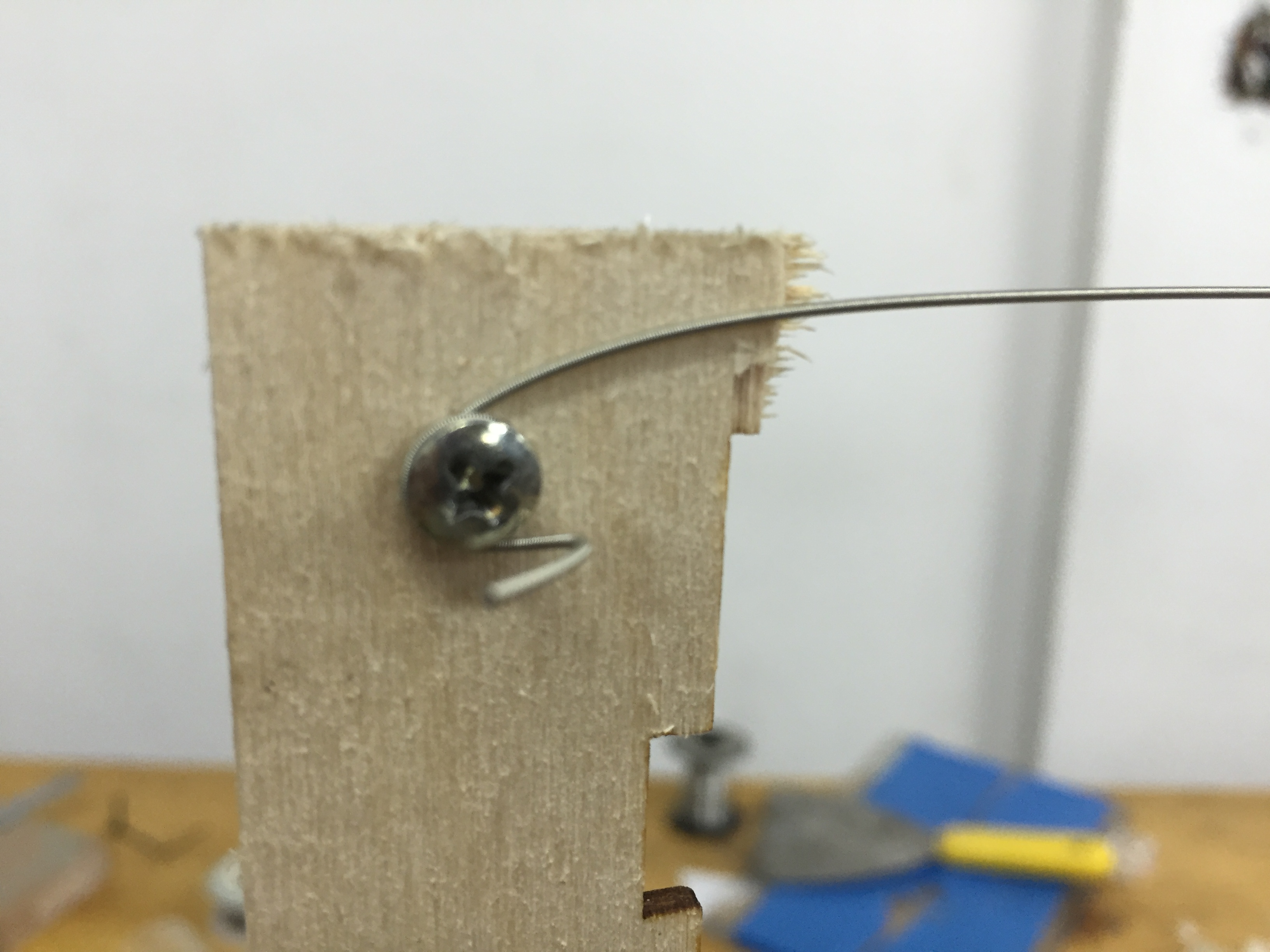
Afterwards he created a prototype to test that mechanism using the laser cutter , some nails and strings.
And here is a video demonstrating the potential movement.
Afterwards Joseph started modeling different parts of the MTM kit and the components of this mechanism

After a while we decided we would go for something else to we gathered and had a discussion of what the machine would be.
We decided that we will make a foam cutter.
So we divided the workload into 3 groups:
- Logistics and operations: which was responsible to find the required materials in the local market and work on the assembly of the machine and testing.
- CAD: which was design the machine to be cut in plywood.
- Electronics: which is responsible for understanding the Gestalt system and implementing it.
The team was then divided into these 3 groups and then we started working.
Our starting point was this instructable:
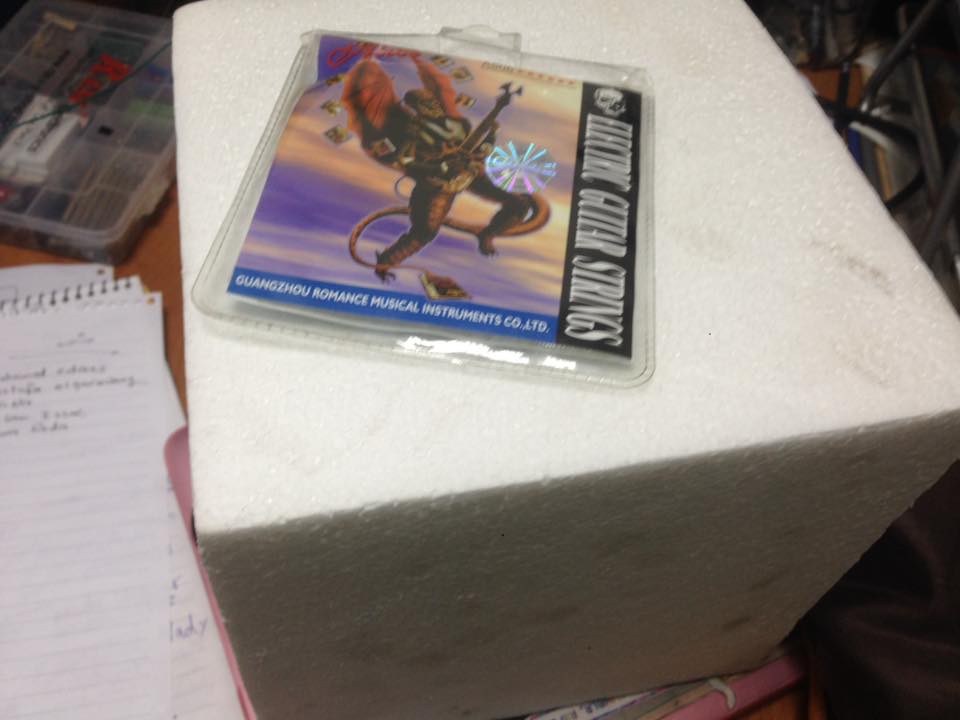
This made us know what we want as a hot wire, the electric guitar string. So we bought a set and a block of foam.
Then wanted to test if the string will cut so we created a handle to test the wire and hooked it up to a computer's power supply and it worked well. So we decided that this setting will be used in the machine .


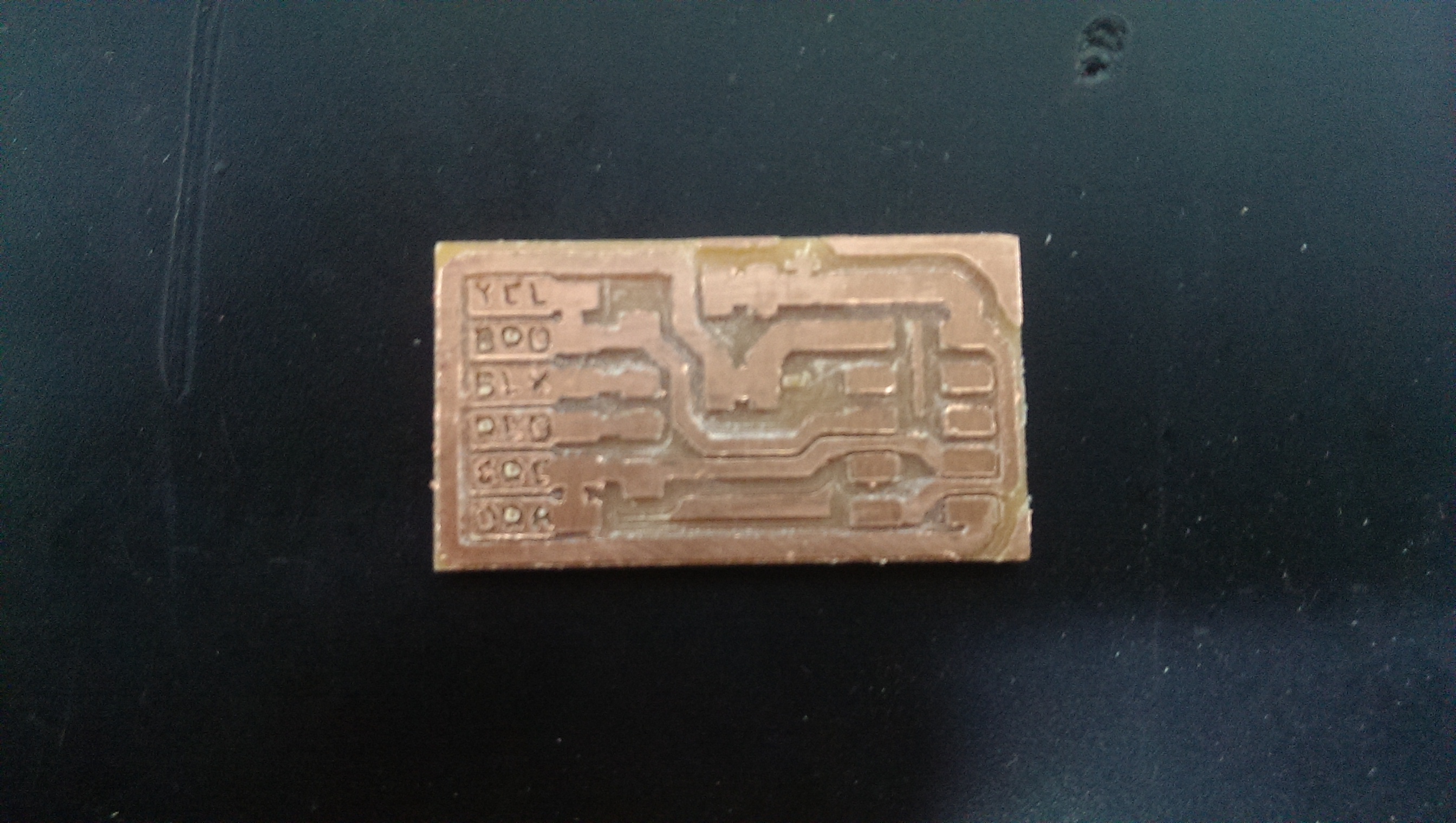
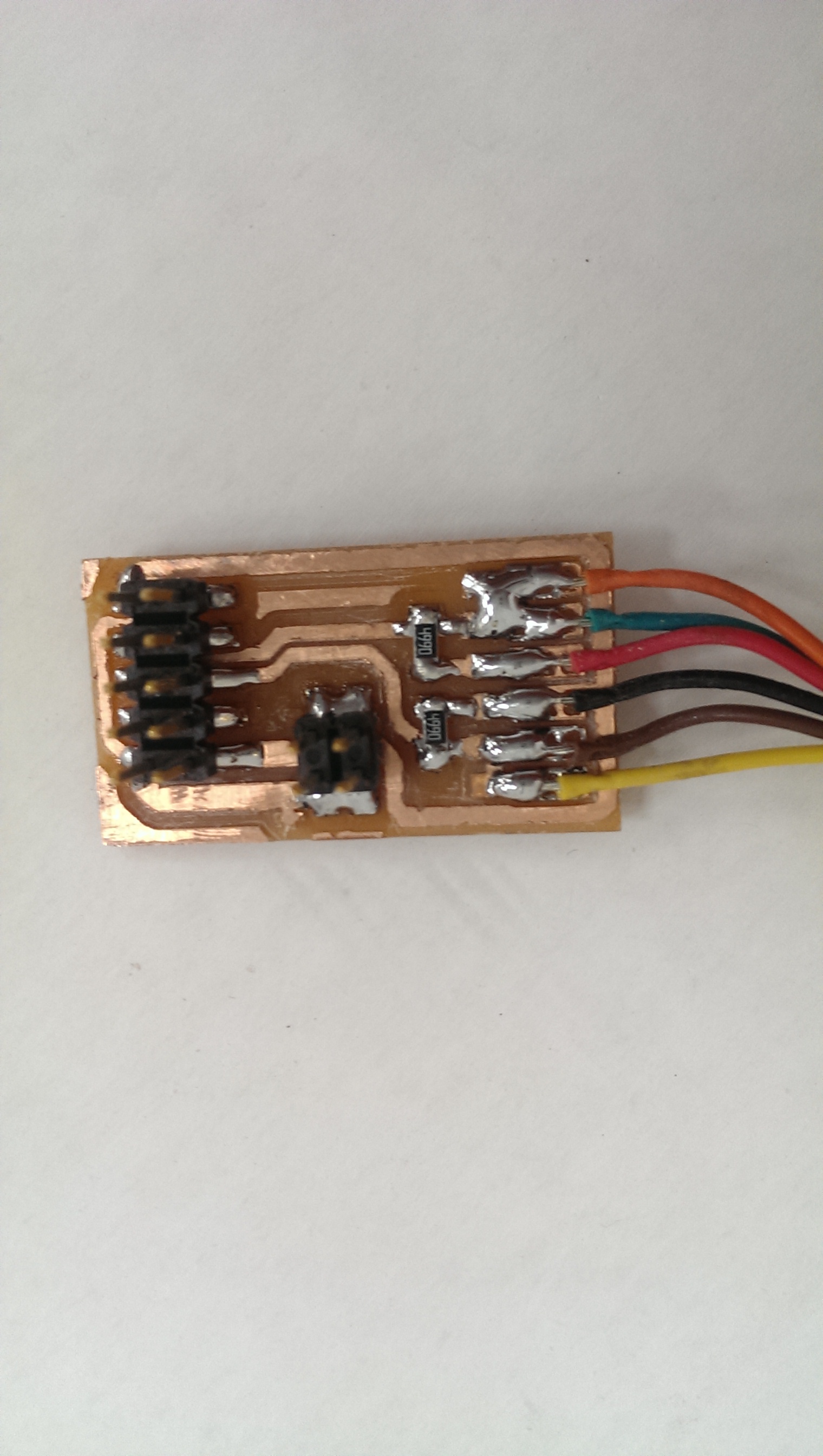
Then for the electronics we made the FabNet board to control the Gestalt nodes
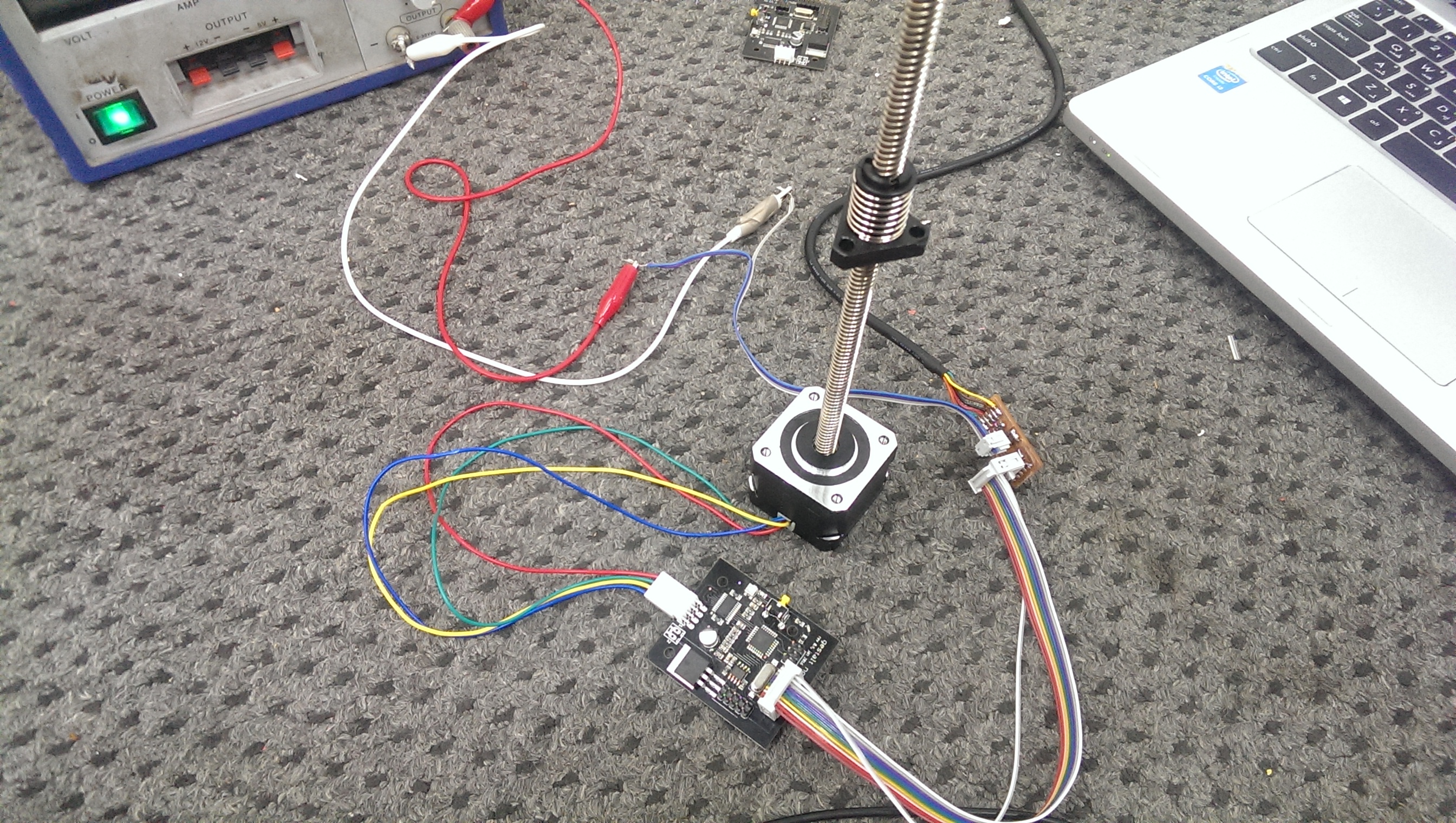
Then connecting a node
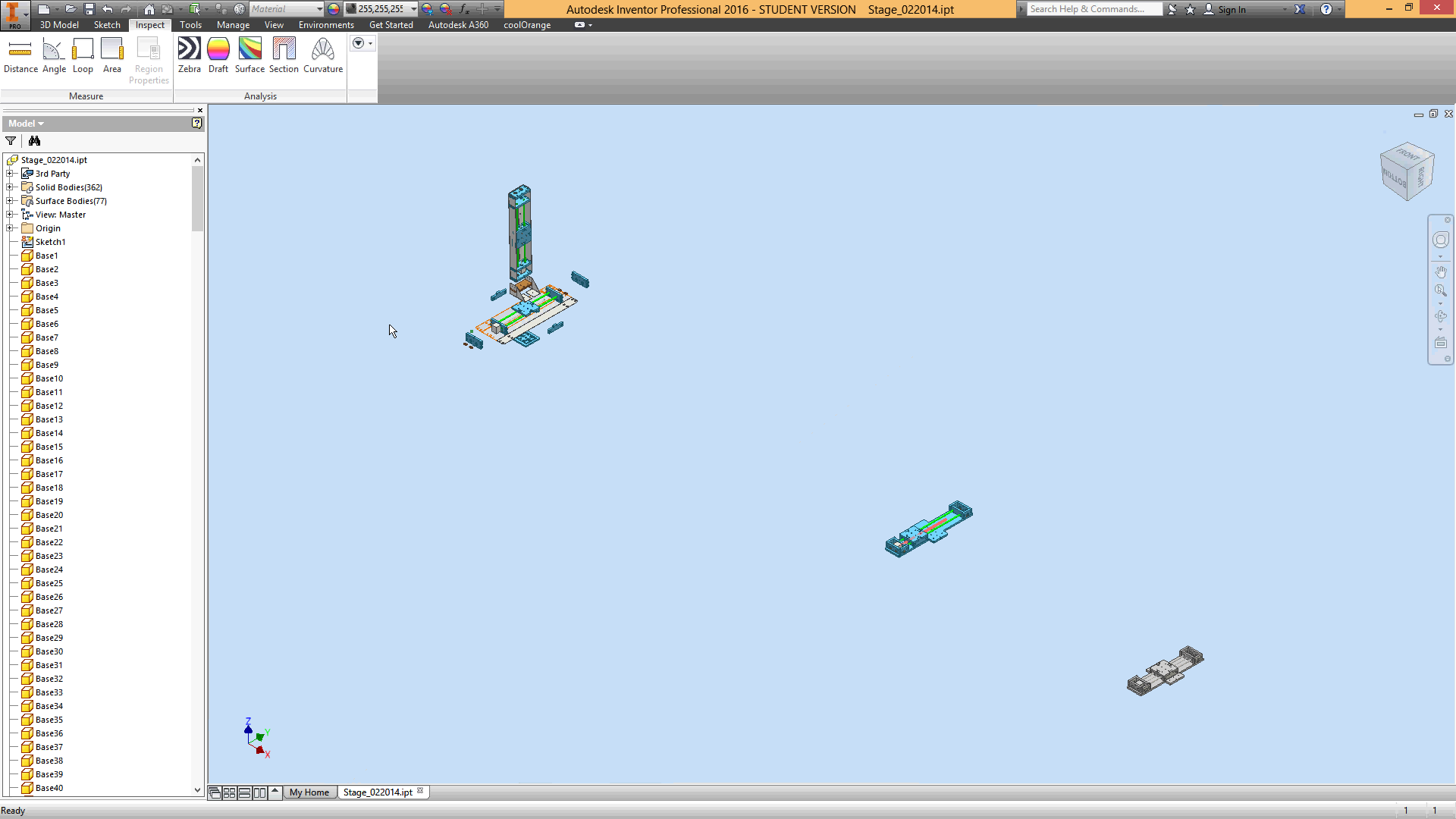
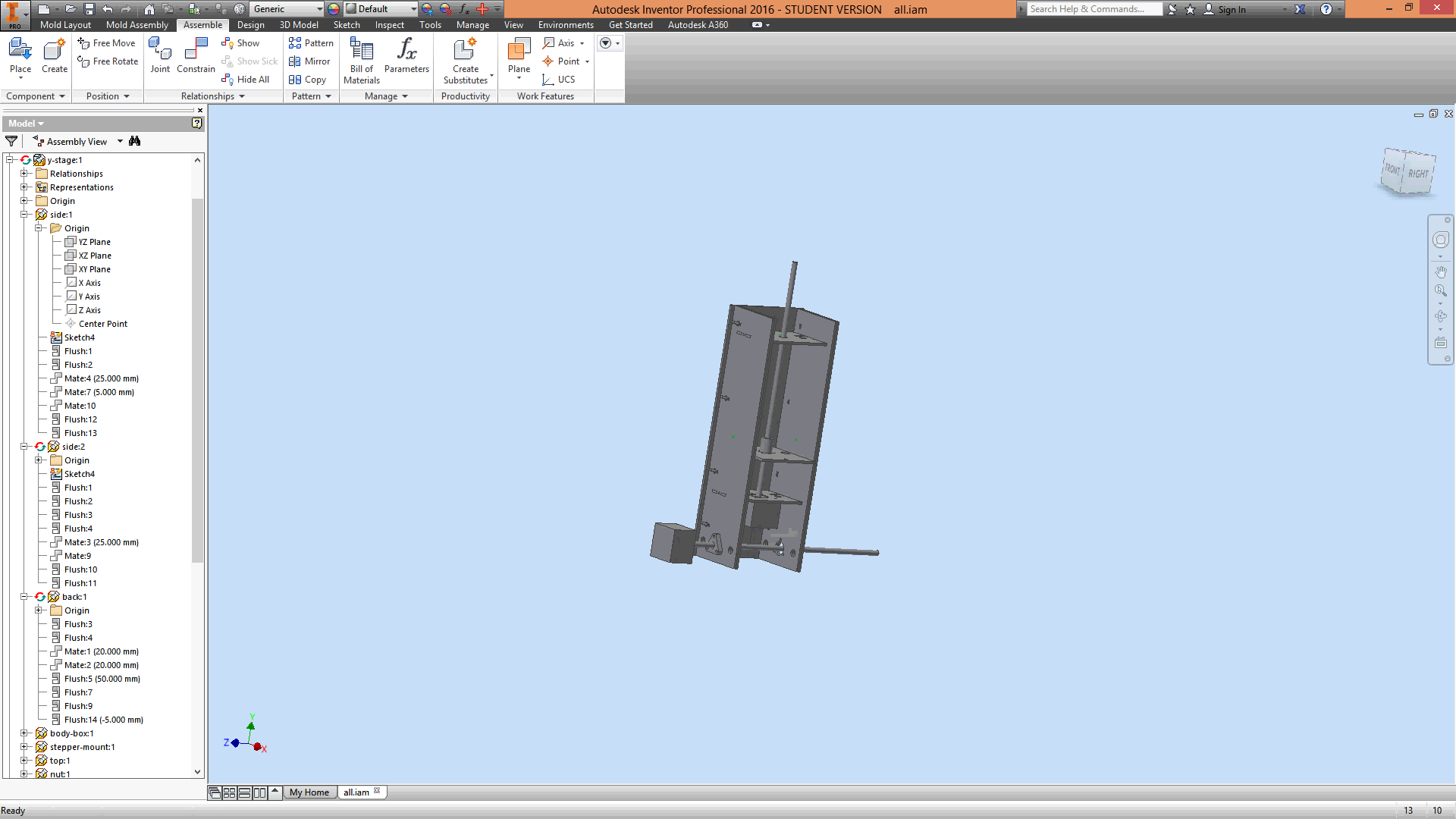
Meanwhile we designed the CAD for the X and Y stages
By viewing The reconfigurable stages machine we designed our machine
There was a huge problem with our laser cutter at the time as the weather in Egypt was so hot reaching more than 40 degree Celsius and the laser was stopping every 1 minute so we had to pause the cutting wait for 30 seconds and resuming afterwards. We had to divide the operations team to take shifts cutting
Then we connected the gestalt boards daisy-chained connected tested a single X-axis and a single Y-axis
And then we tested the range of motion
Afterwards we tested to see if the movement of the both X1,Y1 and X2,Y2 is synchronized
We tried an example to cut a step-like path. The first try as the speed was high it ended creating a slope
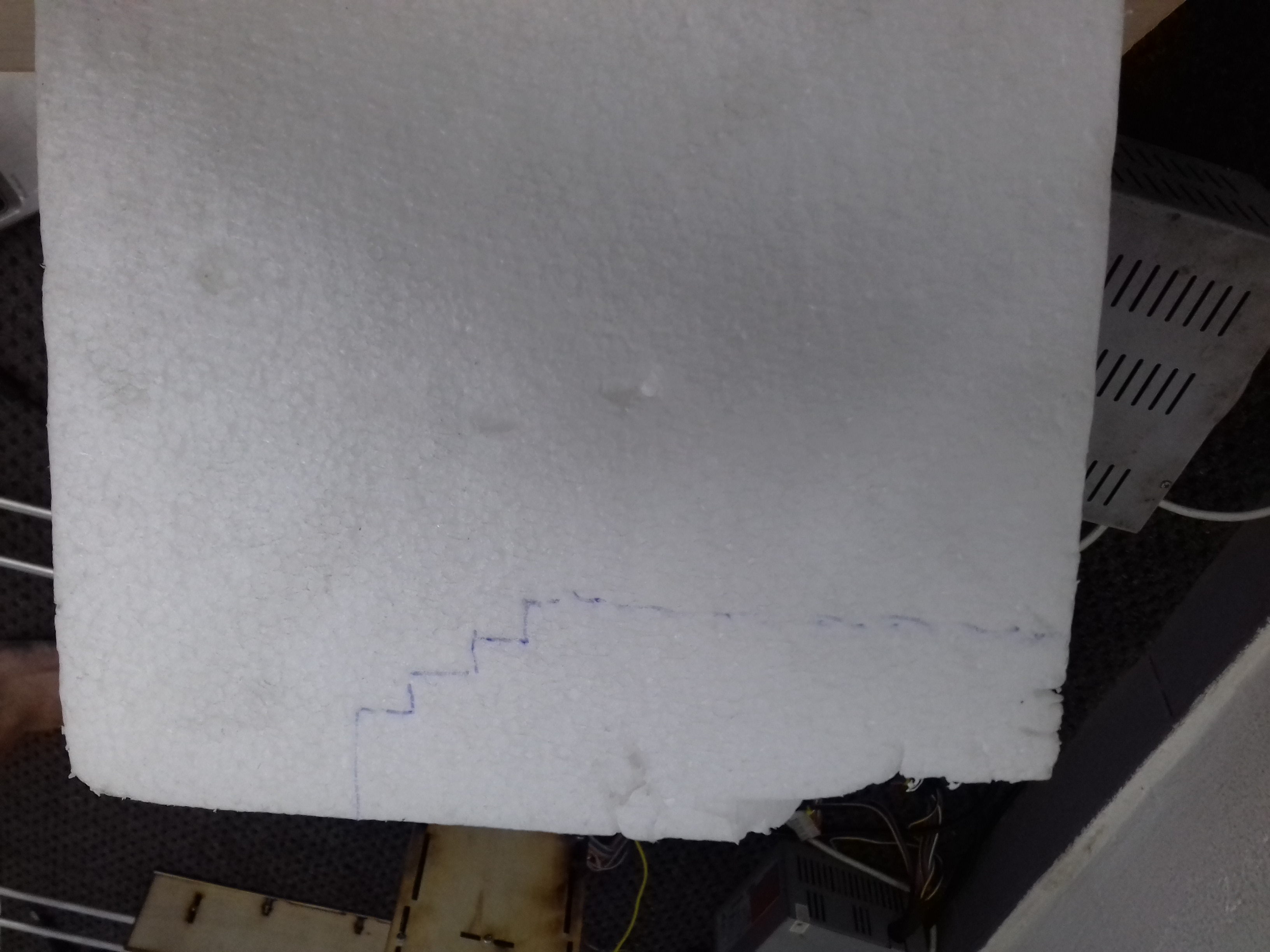


We then reduced the speed and the cutting was successful