Document the group project and your individual contribution.
Xavi Dominguez: Programming
Arnau Tàsies: Graphic Design / 3D Modelling
João Leão: Electronics / 3D Modelling
Katerina Labrou: 3D Modeling / Programming

















A step by step guide.
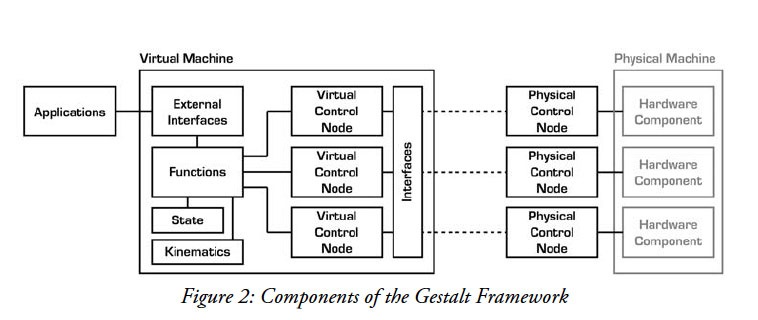
1. Download pyGestalt Framework and install it.
--> in the directory where setup.py is:
sudo python ./setup.py install
2. Programming the Gestalt Node with and AVR.
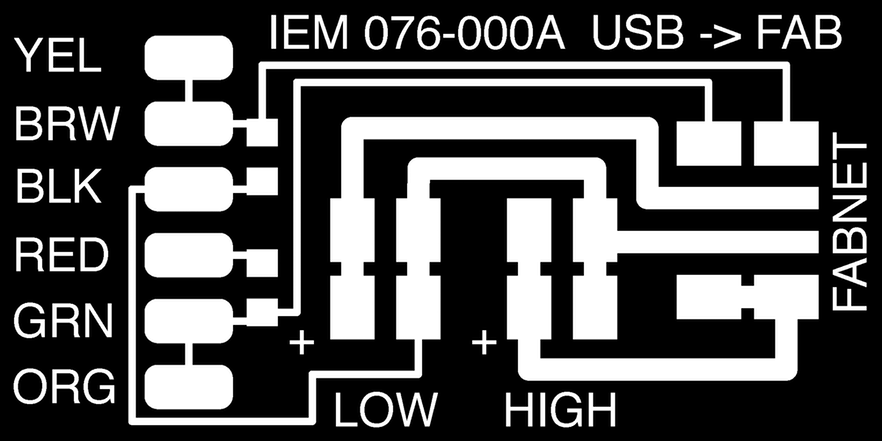
Why? -> The Fabnet to node connector is not typical!
-> Are nodes already programmed? Yes, we have it.
3. Download and Install pyserial -> order to talk over serial
-pySerial is a module to communicate python with the serial port ( Python Serial Port Extension ).
download from here.
installation guide.
sudo python ./setup.py install
- pySerial Documentation
On Mac Os installing PySerial & pyGestalt from the Terminal:
1. Download and extract pyserial.
2. Navigate via Terminal to the folder you have pyserial extracted, in this folder you should have a file called setup.py
3. Run this script
sudo python setup.py install

At the end of installation you should get a message like this:

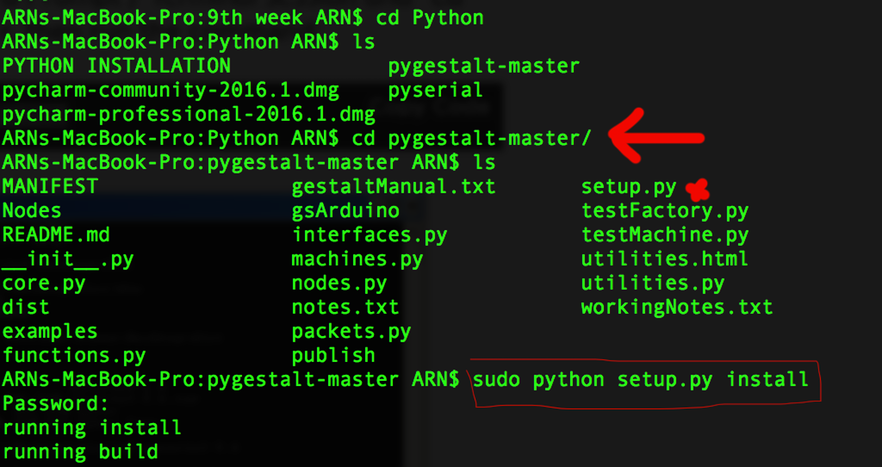
A similar process should be done for the pyGestalt
1. Download the Nadia Peek pyGestalt framework.
2. Navigate in the command line where your pyGestalt folder is located.
3. Run the command: sudo python setup.py install.
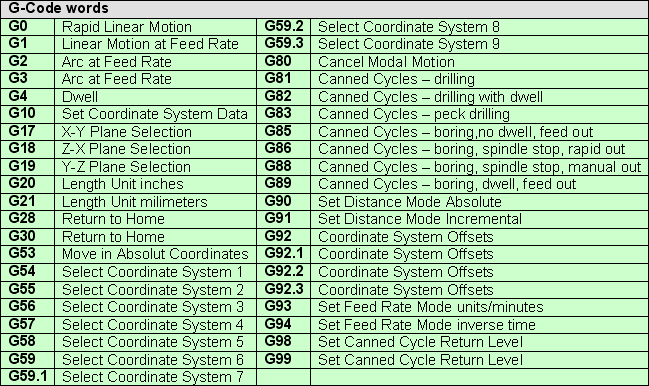
* Generate GCode thanks to this tutorial.
Main GCode commands.
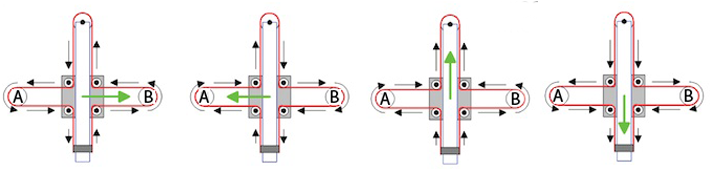
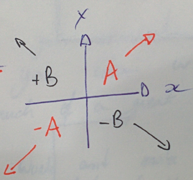
Commands for XYCore Mechanics here.
Robopaint software for drawing robots.
Firmware used in a similar machine.
Arduino 2 axis GCode interpreter.
PNG -> GCODE
G-code is a language in which people tell computerized machine tools how to make something. The "how" is defined by instructions on where to move, how fast to move, and what path to move.
GCode specific codes.