Week 9/11 - Mechanical & Machine Design
Group Assignment
Make a machine, including the end effector, build the passive parts and operate it manually.
The Project
Go to Machine presentation
Performing a collaborative work requires a lot of tuning between the different participants, it is important to identify the weaknesses and strengths of the participants in order to progress effectively in such a short time.
The first obstacle was to choose the project for the assignment. Realizable in time, achievable according to our abilities and that fulfills the expectations of all the members of the "team"
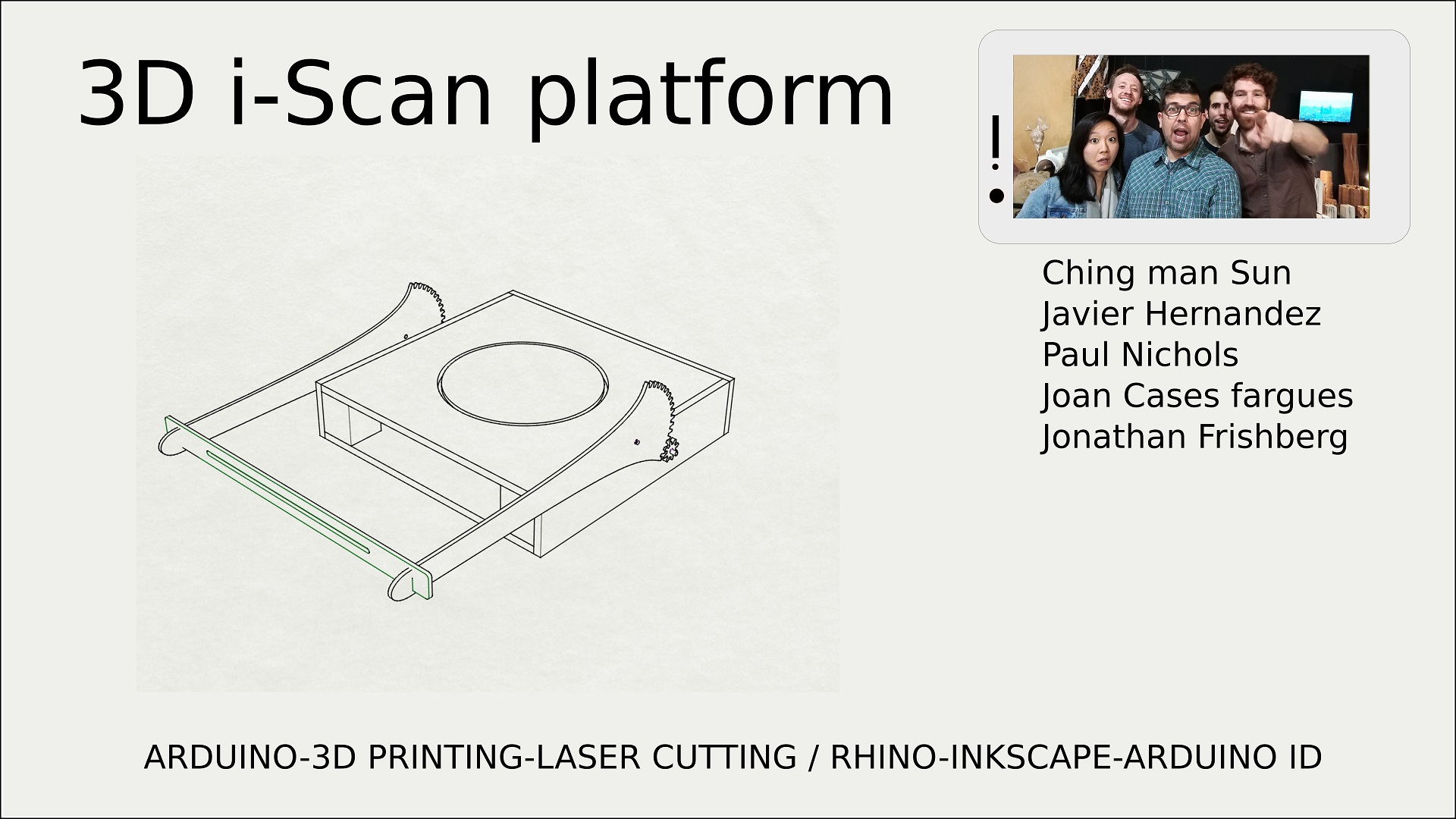
In this first stage we decided that the main factor to choose the project is that it could be "replicable", so came out the idea of the 3D scanner using a smartphone. Nowadays almost anyone can have a smartphone as well as we can find applications to scan objects or people in 3 dimensions.
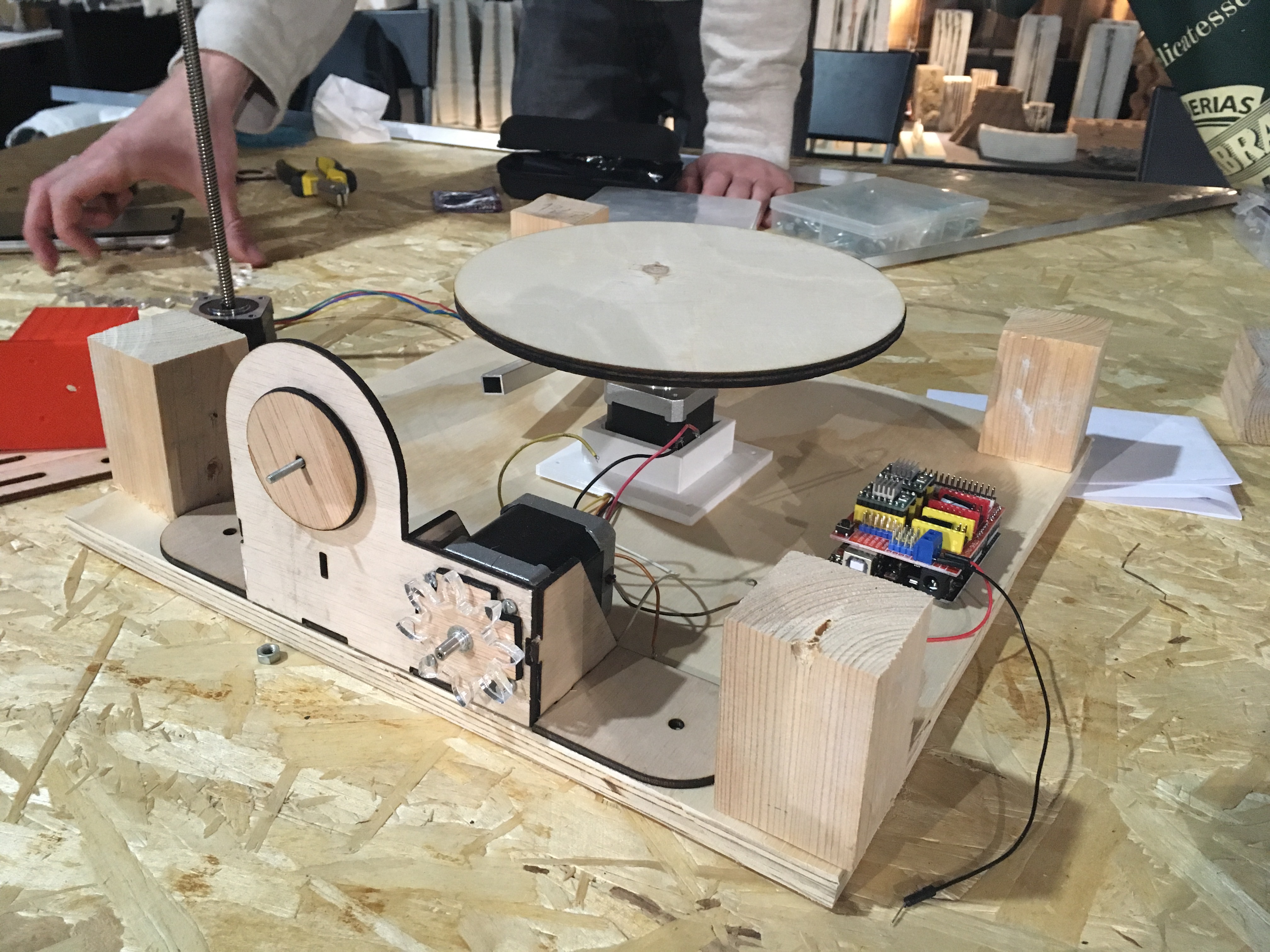
The project: Develop a platform to scan objects in 3 dimensions using a smartphone through an app.
individual contribution
From my experience as a lab manager and as a member of the team with the most experience I tried from the beginning to organize the ideas and establish limits between what we could not do and what we could do for both the productive capacity and the time we had. Everyone in the team was assuming roles and responsibilities pro-actively.
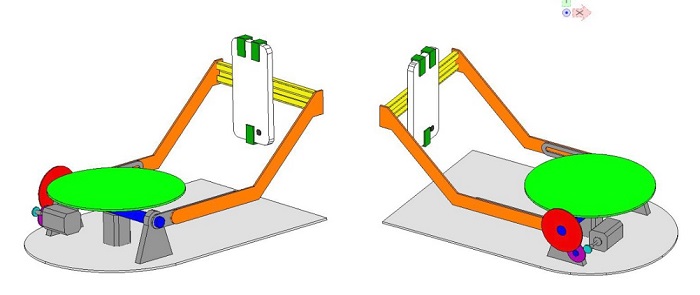
Although the idea or concept was clear, it was necessary to sketch what could be the project and the physical elements that made up the platform. A first sketch made by me was chosen as a reference to start working there. The sketch included all the necessary parts for it to work. Now we had to start making it happen.
Before starting to work on a final design we had to do tests for what I designed and manufactured parts of the platform separately to make more flexible the initial prototype which allowed us to modify distances between the different elements.
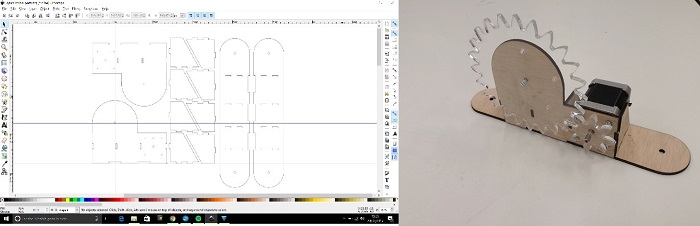
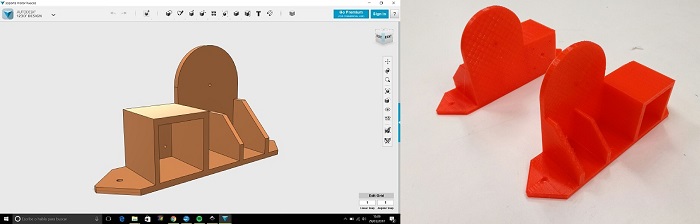
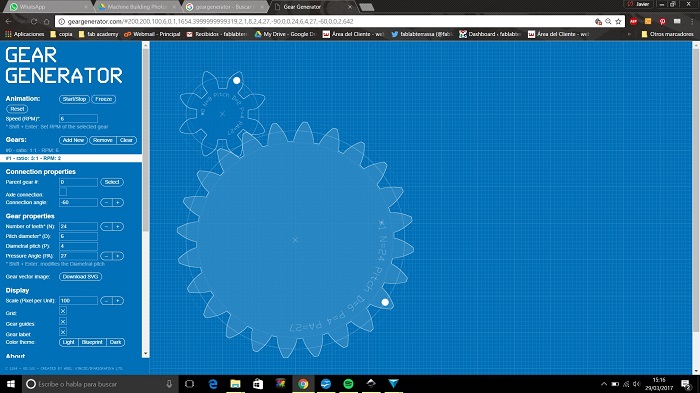
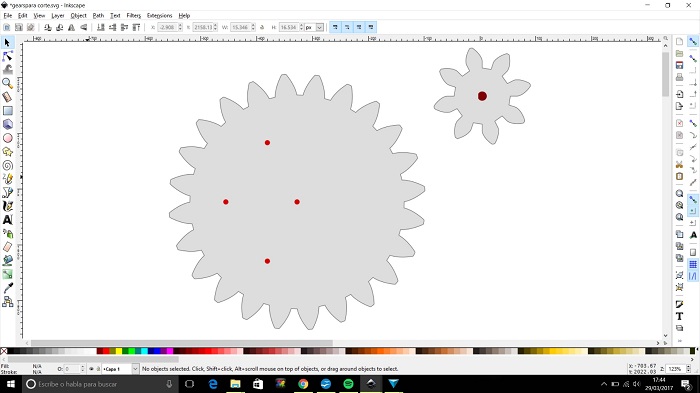
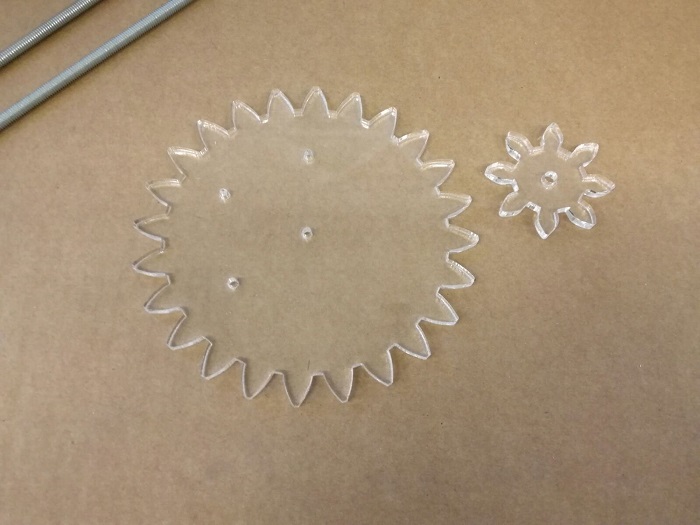
Support for motors, gears, pinions, accessories to hold parts, support for the arms and even tested with aluminum profiles for use as telescopic arms.
Once the initial prototype was armed, we were able to verify the problems that we assumed could have different mechanisms and parts of the platform.

The solutions were diverse and sometimes contrary to mine but this project is about learning and even knowing that some solution would not work I should let my colleagues experience it, is the case of the change of relationship between gears. Finally we come to a suitable solution. Mechanically the platform should work.
The first phase of the project was finished and we should move towards the implementation of these improvements mechanically as well as the programming solution.
Improvements after prototyping
At this stage of the project we define some mechanical and design improvements.
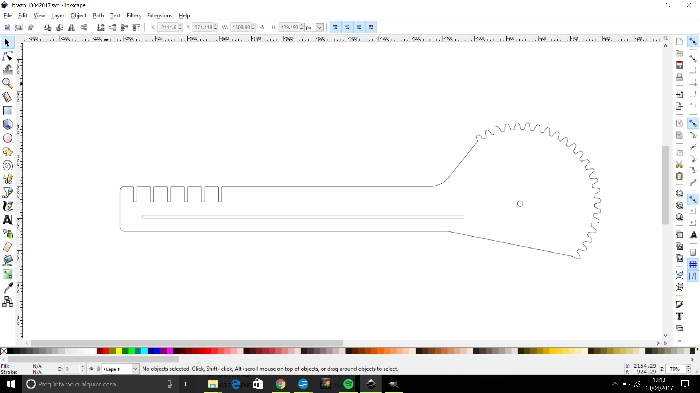
We finally set the maximum distance of the arm. The design has a larg perforation to insert a piece of wood to give less flexibility to the arm
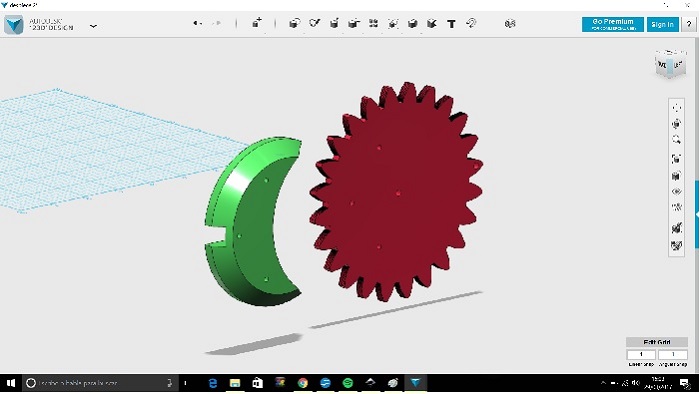
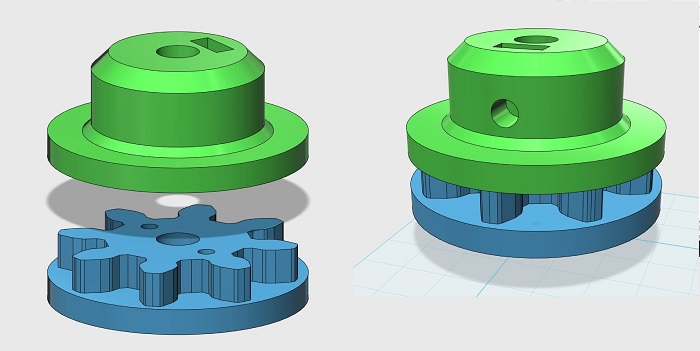
Another inprovement was the design of a 3d printed pinion that is attached whit a pinion holder that has the form of the shaft and also a nut to use a screw.
To download files go to the Machine presentation