Week 10:
Machine Design, week 2/2
Vocabulary
+ PolarBot ~~ Ferdi showed us how our machine was not an x-y plotter, but it is actually a PolarBot. Because it is vertical, it does not use straightforward x-y plotting. Because the machine uses strings to move the drawing point, it does not account for the tension of the strings and the gravity when it is moving the motors. So instead of a straight line, you get a curve. We have spent a lot of time this week trying to correct for this, however we haven't yet had success.
+ "No hot plugging, no backspinning, no tears." Ferdi quotes Nadya.
- hot plugging ~~ adding or removing devices without shutting down the operating system ~ in our case, this means don't add a power supply until you've connected to the computer, and don't unplug the USB from the computer until you've shut off the external power supply
- backspinning ~~ don't turn the motor manually when it is not powered; when it is re-powered, it could jump suddenly to where the software thinks it is and cause damage to the calibration
These notes address the fact that motors act differently when they are operated by software, and also that they have a powering up and a powering down that it probably PID related: it needs to finish its protocol. I think. At any rate, don't do the above. Except crying, which is good sometimes.
+ "Learn to ride the PID seesaw."
PID is a way to control on/off that essentially decelerates and accelerates I/O instead of doing a hard on or off. It's the most commonly used control logic.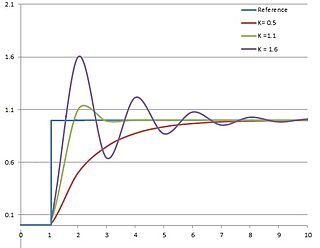
Outcomes Expected
- work together and make an electronically-controlled 2-axis machine that moves according to a plan / design
- document group process and individual process
- post a video of the machine working
Software
- Python
- Graffiti extension for Inkscape
- Grasshopper / Rhino
- Processing
- Kinect
Machines
- PolarBot w 2 Nema-17 stepper motors
Supplies
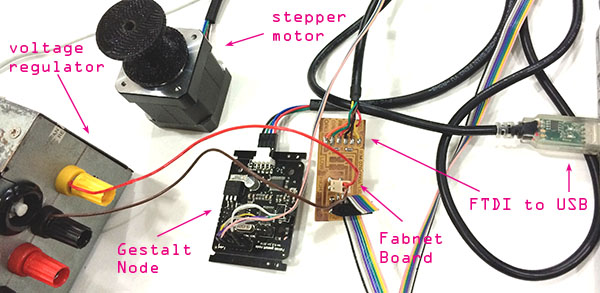
- 2 Gestalt Nodes
- 1 FabNet board and its corresponding ISP chip embedded into a USB plug
- 1 12V power supply
- header pins and wires
- chalk markers ~ brand "Edding 4090," 7.50 EUR each from Raima art store in Carrer Comtal near Plaça Catalunya

Practices
Shread the Big Ideas.
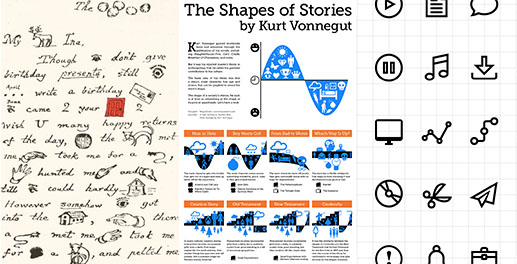
Thirsting for more ideological context, I collected some ideas on the shapes of stories to apply, perhaps, to the PolarBot. We didn't get far enough with the machine to demonstrate any notions; however, a thin paste of ideas helps me stick with it. Here's Kurt Vonnegut's chart of story shapes and a quote from him:
"There's no reason why the simple shapes of stories can't be fed into a computer."
Moving from Arduino to Python.
WORKFLOW FOR BOTH ARDUINO and PYTHON
~ I am using Mac OS 10.10.5.
- Wiring the connections / pins.
- Install library/ies.
- Code plundering, tweaking, or writing.
- Run code through Arduino IDE or Terminal.
- Testing physical system against the code.
We got some motors to sing, then switched to Python.
Cit and Caro looked into it, they decided that using the set-up from Python was better because the program was already intact and we won't have to cut and paste code, as we would with Arduino. Caro is now exploring if this theory is true ...

WIRING.
Primary tutorial here.
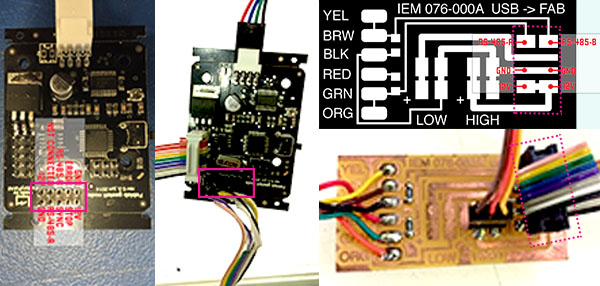
How do you do it? Note that you drop out the blue and green wires on the way from the FabNet board to the Gestalt Node, which means you are not connecting anything to the pins "error," "stop," "sync" and "not connected" on the Gestalt Node. Where blue and green connect on the FabNet side, you will see a trace that goes nowhere, connects to nothing. That's how you go from eight pins connecting to FabNet to six connected pins on the Gestalt Node. You can see in the photo of the connected Gestalt Node that some of the wires have been snipped out of the center of the cable.
To test connections, use a multimeter. Put it on the "making sound" diagram, and test for connectivity (when the boards are plugged together, does the RS-485-A pin on the FabNet board make sound when you touch it and then touch the RS-485-A pin on the Gestalt Node? Etc.)

RIBBON CABLE. You can see that from the pinout of the Gestalt node to the FabNet board, you lose some of the wires. You are only keeping track of which wires connect to the six needed pads of the FabNet board. How do you know which wires belong to which pins on the Gestalt Nodes? Look at the multi-pin header. Hold it so that the wires going out (over to the other thing to which you're connecting) are at the top, like this:
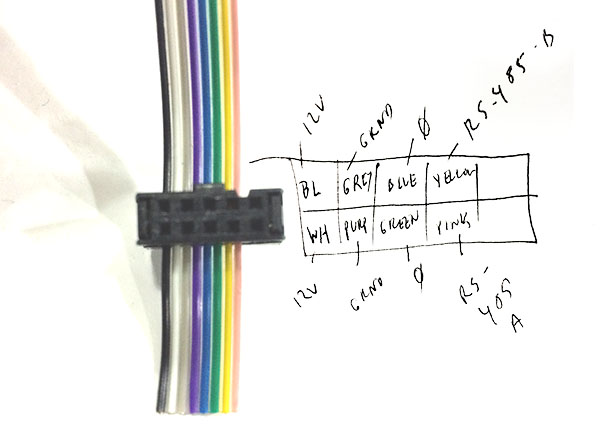
The furthest left wire leads to the top hole. The next wire goes to the hole below that. The next wire goes to the next column, top hole. The next wire goes to the hole below that. The next wire goes to the next column, top hole, etc ...
Python Installation.
INSTALLATION. This might seem obvious, but BE METHODICAL. There are many seemingly inconsequential or optional steps that, if you don't do them in the right sequence, you'll have a hard time figuring out what's going wrong ~ esp because it could be an installation problem, code problem, physical wiring connection problem, power supply problem, Gestalt Node microprocessor problem, or physical construction problem on your machine. There are so many ways to go wrong, that if you are really methodical, you'll be able to limit, perhaps, the number of steps you have to redo to try to solve errors.
STEPS. ~ Again, I am using Mac OS 10.10.5.
- In terminal, type
python. Mac OS should have it. Many people recommend sticking with version 2.7, so if you're running a different version, you might want to re-install. Since now you are in Python, to restore back to the Terminal command line, typeexit() - YOU STILL NEED TO RUN INSTALL COMMANDS, but these are for libraries. First, download and install the library PySerial. See these instructions from Adafruit. You unpack it with the
tarcommand. Do all the instructions listed. - Then, return to the Fab Academy tutorial. The following comes straight from the tutorial page in the "Getting the Software Running" section:
- Download the pygestalt code from here: http://github.com/nadya/pygestalt ~ note that this is an update to the previous version of these instructions; this fork fixes an import error on macs
- Change to the directory and run setup.py to install. I was confused abotu this ~ wan't Python already installed? But this the installation of a library, not of the program. Use the command:
sudo python ./setup.py install
- You need to change out a command in the Git-archived programs to refer to the specific USB port into which you're plugging the FabNet board. Find the name by which your computer refers to your USB port by typing the following into the Terminal:
ls /dev/tty.*
Then you can read that serial port using the screen command, like this:screen /dev/tty.[yourSerialPortName] [yourBaudRate]
For example:screen /dev/tty.usbserial-A6004byf 9600
- Continue on as the tutorial says ~ open whichever .py file you are using in a text editor (like Brackets, Atom, Sublime, etc.) and change the code, save it, and run it from your Terminal.
Problems, errors:

Knowing nothing, I don't know why. I check the version of Python:
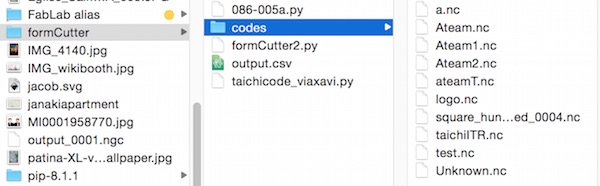
I check the location of the file I am trying to run and make sure there are no extra temporary files there. It should look like this:
It can get cluttered like this:
And in one clean-up, I threw out a file I needed.
Xavi helped troubleshoot ~ he's a programmer and read the errors the Python program was giving with more savvy than me. He knew where to look to verify things were in order.
Analyzing the Machine
PolarBot issues.
- mirrored image
- uneven coordinates
- tilted axes
Here are four test files:
- a test with Inkscape's graffiti plug-in (a 20x20mm square; anything bigger made our strings break)
- a commented python x-y plotter file
- a text file of many coordinates that we tried converted from g-code into lists readable in Python's format via Grasshopper (thanks, Santi)
- code conversion of Taichi's work to translate from g-code to Python coordinates and export as a .csv via a GUI, explained to me by Xavi
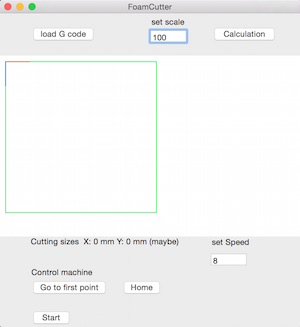
Running the Robot
As you can see, we were still calling it a DrawBot at this point, before recognizing that the curves in the lines of the square were caused because it is a POLARBOT!
Attempts to Address Curves Caused by Polar Axes
PROPOSED METHODS:
- Measure the window and try to find the sweet spot.
- Break down the segment lengths via Grasshopper, making the curve unnoticeable on short segments.
MEASURING THE CANVAS:
- 1410mm across the window
- midway point marked with an arrow: 705mm
- center of spindle to center of spindle = 1268mm
- window bottom to top = 758mm
- middle of spindle to bottom of window ~ 750mm
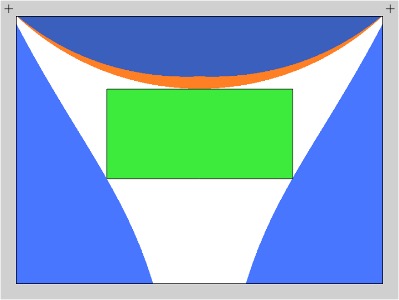
Trying a canvas that is 500mm x 500mm to get within the area that can be drawn well (according to the v-plotter drawing diagram ~ trying to find the green square).
MOVEMENT TESTS and NOTES:
- Starting from 0,0 at bottom center of canvas
- -20 in the x-axis goes up and to the right app. 150mm
- -20 in the x-axis goes up to 560mm in a curve and stops
- positive x moves clockwise
- positive y moves counterclockwise
- * still need to see if flipping wires will stop the image from mirroring
- 360 degrees = circumference of spindle = 14mm
1.8 degrees is a typical step, so 200 steps = 3.14d = 44mm / 200 = 0.22mm = one step - 1mm = 4.55 steps
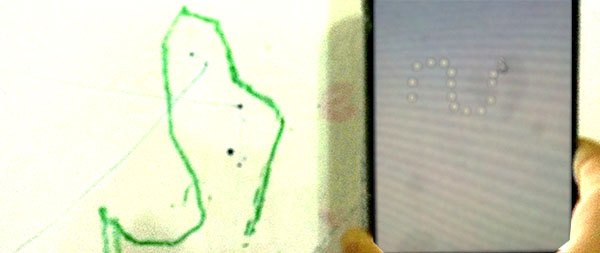
- DRAWING A STAR. In Inkscape. The bot moved 30cm down from a "zero," then 6.5cm for each leg. It is mirroring the image.
In order to take the string of numbers generated as g-code from Inkscape and put into Python, we had to do it by hand.
It is this: [0,0],[13,26],[6,30],[-1,26],[0.2,34],[-5,40],[0.3,44],[6,49],[10,41],[18,40],[12,31],[13,26],[0,0] - Advice from Ferdi to redefine the step forward to correspond to size in the file. Do this by altering
elements.leadscrew.forward(8)in the .py file code, so that 8 is sized up or down proportionally. I did try this, and it did not change sizing of the image in any appreciable way. Maybe because the image is already too skewed by its placement on the canvas? - To redefine x and y, delete persistence files.
PYTHON CODE for translating a string of numbers. Xavi explains what he did:
- Get g-code from a .png.
- Write a .php that translates that g-code into coordinates in lines and saves as a .csv (Xavi made it so it goes through website).
- Run a python script that reads that .csv
- The python script translates that .csv string of numbers into a string of numbers that sends commands via the python syntax.
- On Taichi's website you can find some things to load the .gcode from Inkscape into a .csv to parse in into Python coordinates. Find the correct libraries and install on github (use
cd pip-8.1.1, thensudo python setup.py install, thenpydoc modules). Make sure in the folder where that .py is kept, you also have a file called "output.csv"
The drawing machine video below, edited by Gori, shows as far as we got!
DISCOVERIES:
- some of the limits of the drawshape
- seeing varying distortions in the field
- small increments vs larger stretches DO NOT seem to correct
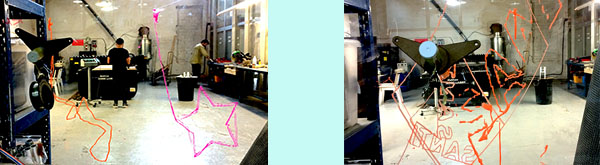
- Inkscape graffiti plug-in working
- make an .svg
- convert shapes to paths
- in extensions/gcodetools look for "orientation points" and create
- find extension for graffiti: be in the tab that says "path-to-g-code" when you click apply, otherwise errors arise
- you will see red arrows showing path directions
- you will see a new file wherever you specified it should go; the file is .ngc
NEXT TESTS:
- Flip the motor wires. Goal: figure out why the words sent to the drawing space are flipped.
- Figure out the limits of the right-tensioned space.
- Figure out a mathematical transformation to add to g-code to make polar-code for Python.
- Problems remain: where the bot starts, the image is rotated 180 degrees, drawing space not mapping yet to a Cartesian geometry.
FUTURES:
- Still hoping to map a legible space that reads accurately the digital image number-referenced (i.e. g-code) input to an output that maps accurately and predictably to the space.
- Add a real-time interface with Kinect.
- Meaningful interaction based on a prepared canvas that suggests a route for interaction. *maybe overdetermined in my thinking; still contemplating the open-box approach of modularity, or what I call the GIK aspect ~ the building blocks, rather than suggested via for a predetermined range of conclusions
Reference Sites
- Fab Academy tutorial on Gestalt
- Francesca's great notes on process
- Taichi's code work
- Wellington's Scribbly Bear, a similar project
- example of real-time drawing interface, which is where we hope to go with this
- How to use Inkscape's graffiti tool to create g-code
- BEST explanation of the polar problem
- explaining Bresenham's line algorithm to deal with curving in a polar coordinate system
- help here and here with managing how Python can deal with .csv files
- notes on Grbl code for steppers
THE TEAM:
~ Caro and I got our computers (hers Windows, mine Mac) to run the Gestalt Nodes.
~ Cit got Kinect to output a string of numbers that could be read by Python.
~ Cansu worked on making a holder to fit the chalk marker.
~ Gori figured out the Inkscape extension for a graffiti g-code that could give us the information we needed for Python.
~ I was working on mapping the computer commands with a workspace on the actual canvas. Santi helped with this via Grasshopper commands.
FILES
You'll find files for the motor bases, the motor spools, and more code tests.
THEORIES, IDEAS, OTHER

RECITATION. It was by Jessi Baker, the CEO from Provenance. Her company is working on using blockchain technology to trace things and the authenticity of their provenance.
Her project with blockchain is more interesting to me than Bitcoin; it's more in line with Wikileaks. It's a verification and tracking process for an object's supply chain and, potentially, its life cycle. I have limited interest in Bitcoin because I don't understand its revolutionary possibilities, perhaps; it reads to me like a nascent economic system that, as it develops, will reincorporate all the difficult aspects of our current economic system, just with a steeper rise of technocrats. Maybe my skepticism comes from viewing it from a longer perspective than a venture capitalist horizon. However, I think Provenance's stuff tracking system has some great cradle-to-cradle applicaitons. Tomas mentioned it as a way to track the input and output of the Fab City.
Is the Fab City a walled city? Is it better to imagine a city walled if the walls are invisible? I am still thinking about this.
LECTURE. We also heard this week from the charismatic young architect Edouard Cabay, who teaches at the AA, iAAC, and Lausanne and Paris.
He had some nice phrases and some interesting juxtapositions:
- Michel Gondry led a week-long workshop with the IAAC Master's students with the goal of using film in a way it is not designed for.
- Combine poetic idea + systematic intention
- A clear material context for a project can create spaces for creativity.
- He showed an architectural application of the food farm concept ~ a spiral vertical food farm, designing the spaces for maximum growth based on light levels hitting each floor.
- Architects usually don't deal w color ... a space to be addressed.
- Using humans as machines. Cabay led a workshop at the AA where the students made a mathematically precise paper structure that required thousands of actions of folding. They decided to work like machine technicians rather than like machines. The rules they determined were: each student doesn't touch the material ~ s/he gets 3 friends to fold instead. The students only give the directions. The volunteers then become like machines for the students. I imagine a vocal synchronicity of calling out dimensions to fold, the way I like to imagine a Cuban cigar factory might have worked.
- Cabay showed a competition for a vineyard project in which there were pillars of wood supporting an elevated space. "The building is planted," he said.
- Neat reference: Gustaf Bateson, Ecology of Mind. Forward by daughter Mary Catherine Bateson, who memorably said in a Long Now talk: "Divorce is the new death," referring to how short lifespans used to obviate the depressing length of a marriage. (Read Stewart Brand's excellent summary of her talk.)
- Cabay says peak of energy in a life is at 24. (This cannot take pregnancy into account.)
- Cabay's architectural photography reminds me of der NeueSachlichkeit photographer Albert Renger-Patzsch.
- Cartography is a tool that materializes intention (and shows difference).
- Form finding can occur through material properties.
- Cabay tells of how he was struggling to draw a curve. A colleague took his a piece of wood and clamped it into a curve on his drawing board. It was the perfect curve. The material shows its constraints, settles into its constraints.
- Drawing as gesture, arm as material w its own constraints.
- Traces exhibit, curated by Cabay, opens 11 May in BCN. It has things like traces left by a graphite ball juddered by the metro, traces from a pen moved by ocean waves ...