Please watch an overview of the machine operation below:
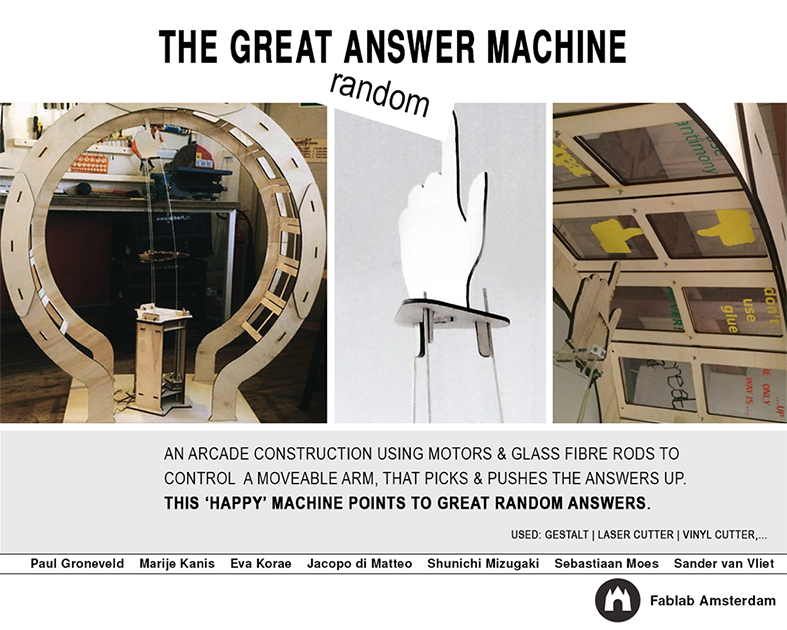
The assignment was to make a machine, including the end effector. To build the passive parts and operate it. We were supplied with motors with integrated lead screws, anodized aluminium rods as guide shafts and nylon bushings. The idea was to either use these reconfigurable stages made out of tri-fold cardboard or create something ourselves to use the motors for our machine. We decided to make a ‘Random Answer Machine’ with a programmable arm. A person asks a question and the arm provides a random answer through a push motion. The concept arised from a group brainstorm during which the participants expressed their priorities as to what the machine should do. An important aspect was that it should make us laugh! It consists of the three main parts.
- The mechanism which will move the arm after programming
- The programmable arm
- The card holder
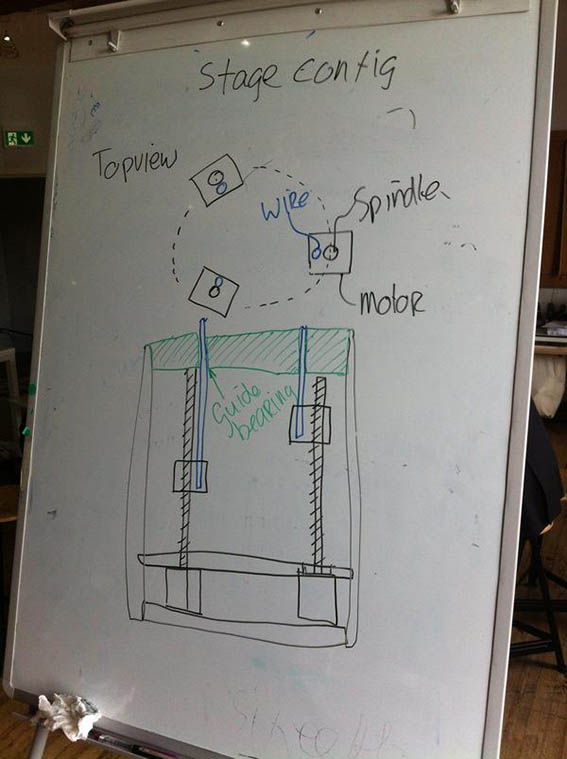
After looking at different machines from other projects the option was proposed to redesign a FESTO Bionic Tripod. The video shows how this robotic arm works. It has four rather stiff and strong wires. By translating the wires the robotic arm can be manipulated to positions within its reach. So a movement of four parallel axis results in an xyz position of the end probe (gripper). The connection of the wires with a bracket in the middle was important to achieve a big displacement from the centre horizontally.
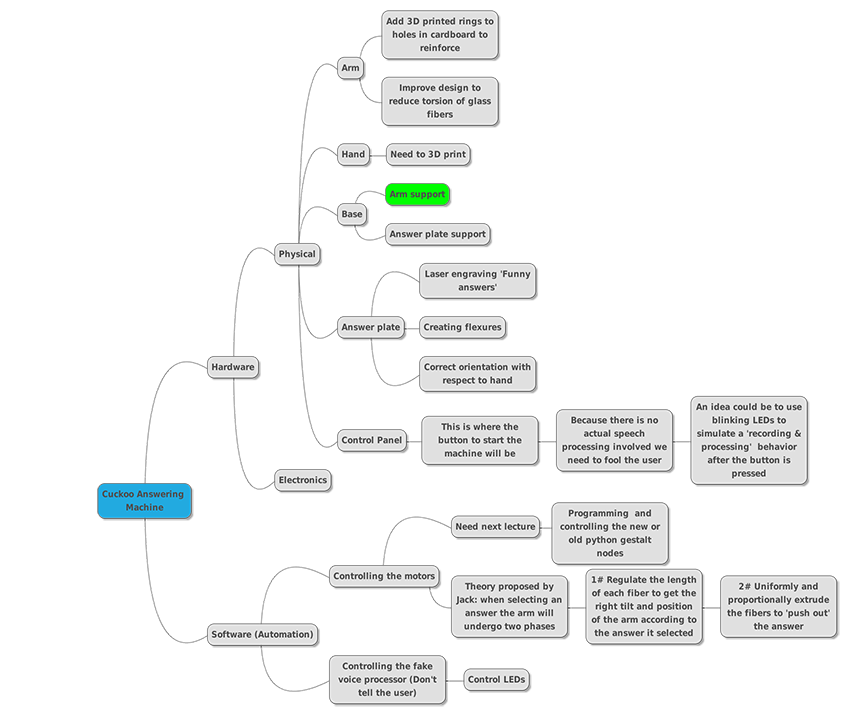
Slowly we started to have a more detailed breakdown of what should be made and we started experimenting with some tests. Jacopo also composed a mind map of what needed to be achieved.
During that trial we saw that the top of the ’arm‘ construction was very heavy and there also was a torsional movement which made it unstable. We made the top less heavy and moved the rods to the outside holes of the cardboard placeholder, thus getting a more controlled movement.








We then tested an arm which would have four glassfiber rods just to see whether we would have more control with those. It was clear that the best option where the three motors with three glassfiber rods. The problem that we had to solve was the gripping mechanism and how we would design and make this grip. After the initial tests and considering the amount of time that we had in our hands we decided to opt for a mechanical arm that would only do a push movement inside our machine, therefore not attempting to grip something. At some point Jacopo suggested that we use rubber bands in order to gain more control over the movement but that did not work out as well as we thought it would. We concentrated our efforts to getting the arm movement as accurate as possible. For that reason Paul created a simulation in SolidWorks which you can see below.
Through that simulation it became apparent that all those pieces of cardboard that we had attached to the glassfiber rods were unecessary and they were making the overall movement very awkward. We decided to minimise those to two sections:
- The arm end plate onto which the palm/hand is mounted
- The fiberglass rods holder

The first version was made out of plywood, but because the wood we used was quite soft, it was pulverized by the pressure we had to apply between the bolts and nuts to hold the rods. We had to make another one out of acrylic which worked better.


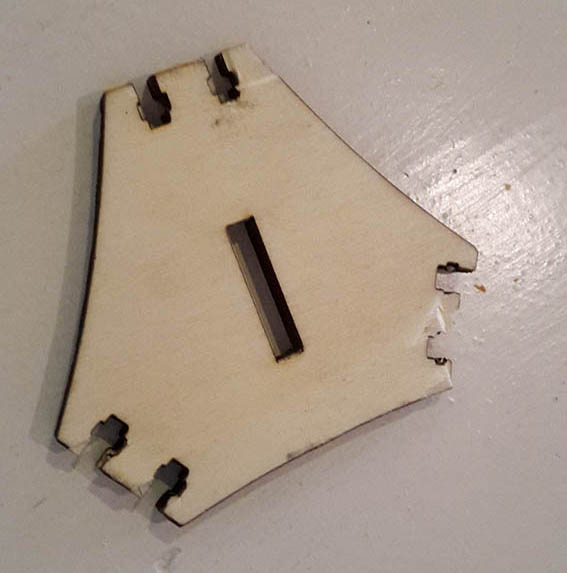
Regarding the rods holder we needed something that would indeed hold them stably in place, but at the same time would provide us with the necessary flexibility to manoeuvre the arm. We had to try several versions of this as it was too fragile and kept breaking. We even tried to stick one on top of the other to achieve twice the thickness, but it still does not give the feeling that it will last for long!
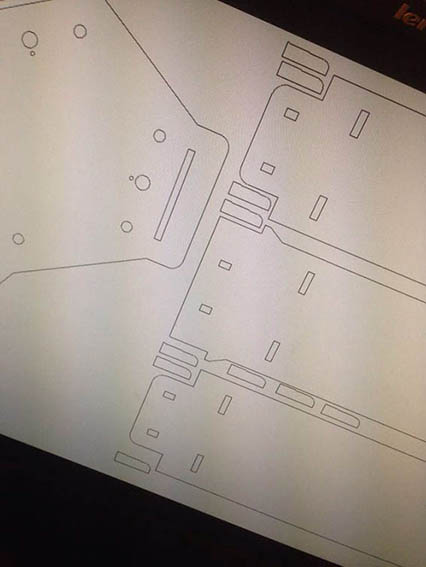
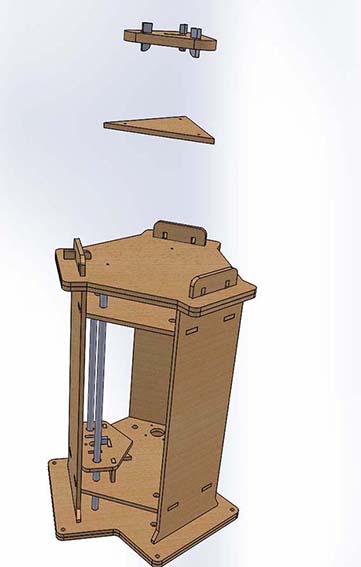
About the actual casing for the mechanical arm, Paul did a drawing and a rendering in SolidWorks.
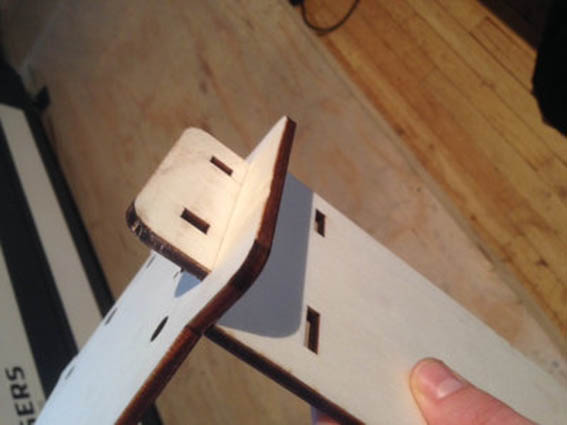
Sander tested some joints on the laser cutter of how it would go together.


People assembled, disassembled and re-assembled to get it to work smoothly. At first by hand and then slowly giving control of the motion to the motors.
Step by step, the assembled construction started looking like the real thing!
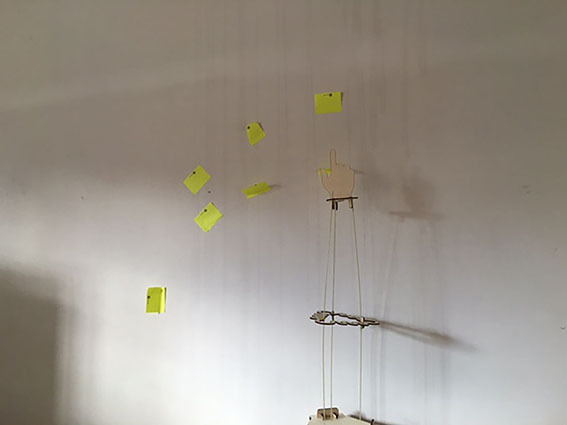
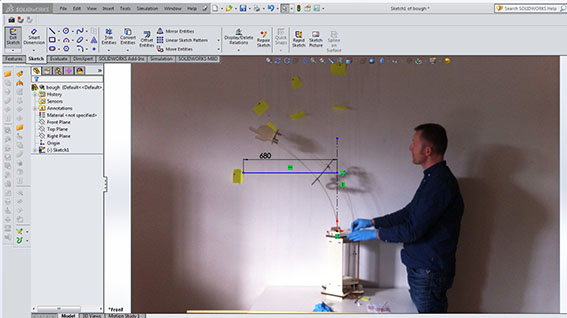
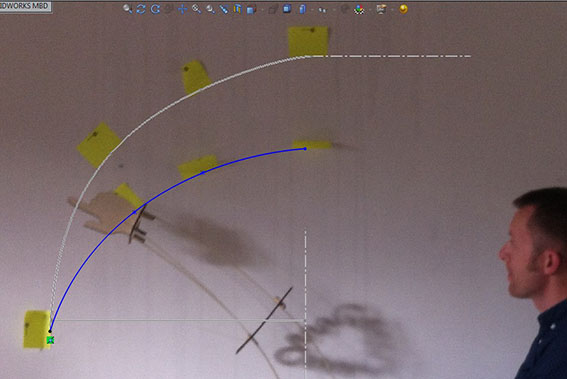
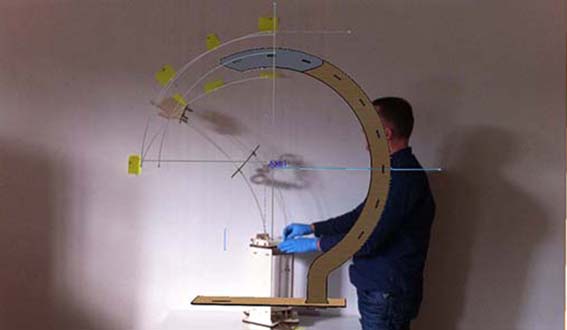
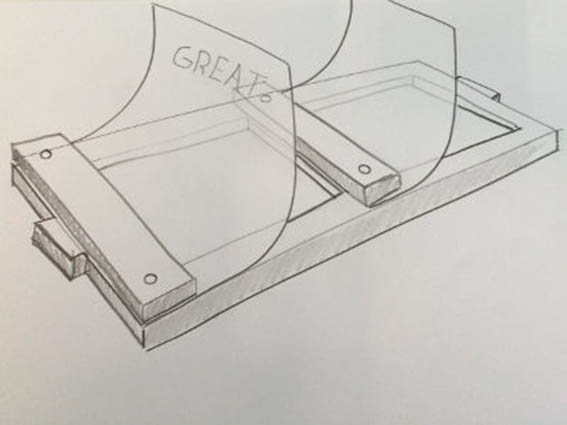
When the frame and the arm of our machine was built it was quite easy to define the maximum reach of the arm, just by sticking post-its on the wall behind the the machine. The picture was then imported into SolidWorks to be scaled to the right size and position. The curve of the maximum reach of the arm could be constructed from the post-it markers in the picture. The maximum reach is close to the shape of an arc. From the maximum reach it was decided that we wanted an offset of 100 mm to push out the cards with the answer. The curves are shown in the picture below. From these curves the construction for the cardholders was drawn.


The final frame sections were laser cut and got assembled in the studio. It was then time for the programming with gestalt and nodes. The objective was to accurately move each rod to the right direction, with the right speed and the right angle. A coordination between the three motors was important so this process was extremely time-comsuming.
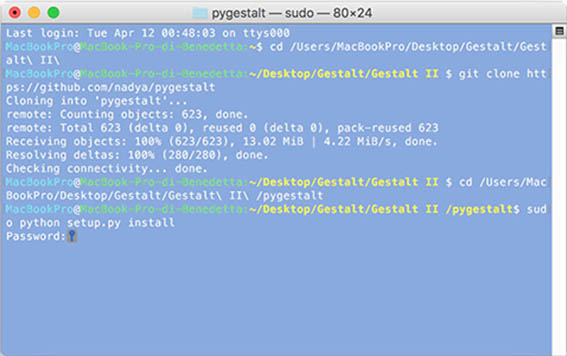

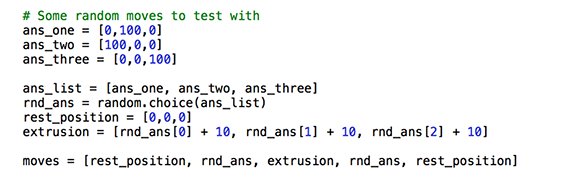
And finally we succeeded in having some mechanical movements controlled by programming code! For more information about this process click here.


The assembled machine was then ready for final tests. It was fully assembled and we could rotate the hand manually very well. The only problem seemed to be that the whole frame was designed in a circle whereas when the mechanical arm bends it needs more space. The shape should have been closer to an ellipse.
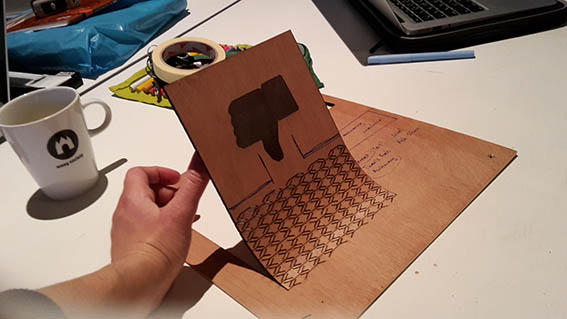


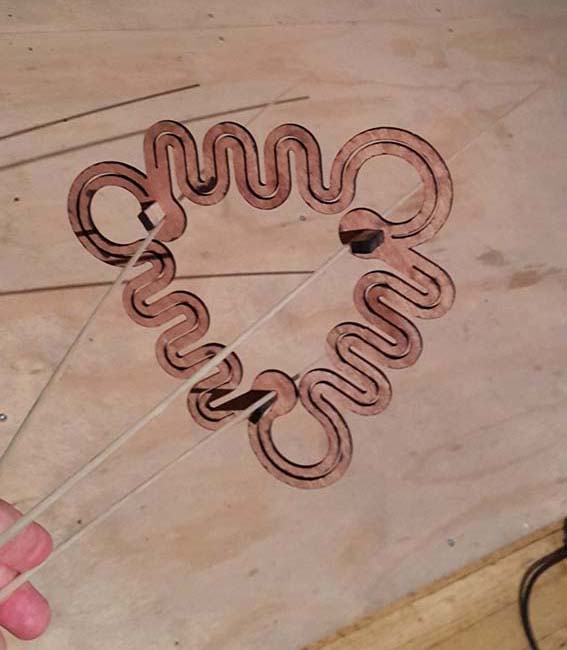
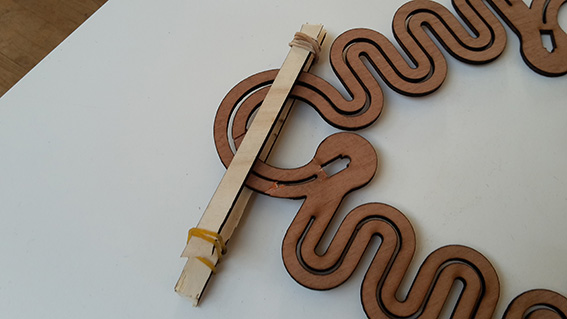
The next step was for the cards to be designed and placed on the frames. However we did not keep the original flexures idea because they where too fragile. We kept the movement of how to reveal the answer to the questioner. That way we would not have to worry about our programmable arm breaking the laser flexures. We aslo explored ideas about the final shape of the hand.




We proceeded with cutting answers on a vinyl cutter and sticking them onto individual thin acrylic sheets which we then screwed on the specially designed frames. In that way, the hand pushes the answer upwards to answer a persons question. We are now in the final stages of programming so that the mechanical arm reaches exactly where we want it to in order to best reveal the answer.
Assembling the cards on the table because our machine is way too tall!

In the future we can see this machine developing into something more useful, while still retaining its fun side. It could be developed into a nice machine that entertains people at festivals and events or it could become a playful apparatus which could be placed in hospitals where it would amuse patients… A more developed version of it could be pointing tourists in the right direction or urge them to explore areas other than the obvious!
Solidworks Source Files Fibre Rods Holder Top Plate Hand Machine Files for Download (Code info) Machine Files for Download (Code for manual control) Machine Files for Download (Code for answer selector) Sticker Files for Downloadand some bloopers: