Mechanical design
Group assignment
Design a machine (mechanism+automation), including the end effector
Build the passive parts and operate it manually
document the group project and your individual contribution
Design a machine (mechanism+automation), including the end effector
Build the passive parts and operate it manually
document the group project and your individual contribution
Our Group
For this week’s assignment, we have form a team to design and build a 3 axis gantry type CNC pen plotter, the members of the group include:
Teo Cher Kok
Hong Guan Soh
Foo Tian Seih
Louis Goh Chong Hao
Phay Ngiap Peng Kenny
For this week’s assignment, we have form a team to design and build a 3 axis gantry type CNC pen plotter, the members of the group include:
Teo Cher Kok
Hong Guan Soh
Foo Tian Seih
Louis Goh Chong Hao
Phay Ngiap Peng Kenny
We got together and brainstormed the various possible configurations, design changes and laser cut samples.

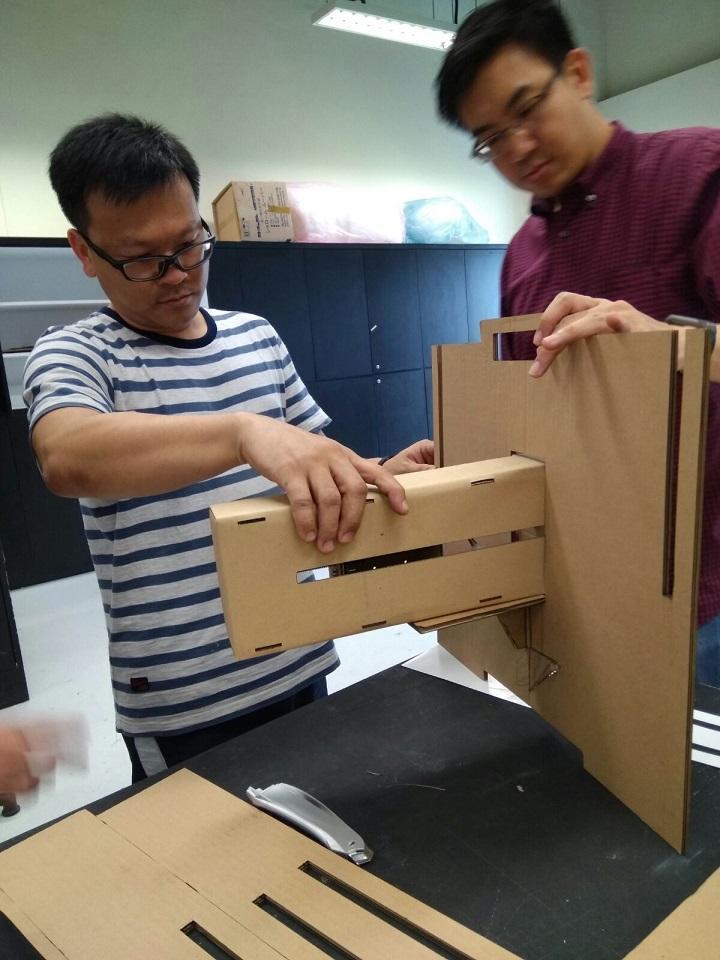
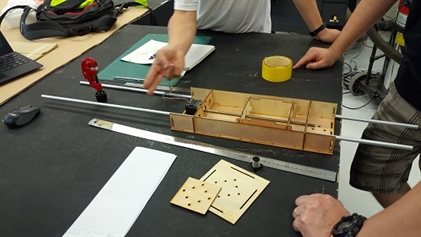
We also studied the use of gestalt motor drive unit, its design and mounting method.
My Contribution
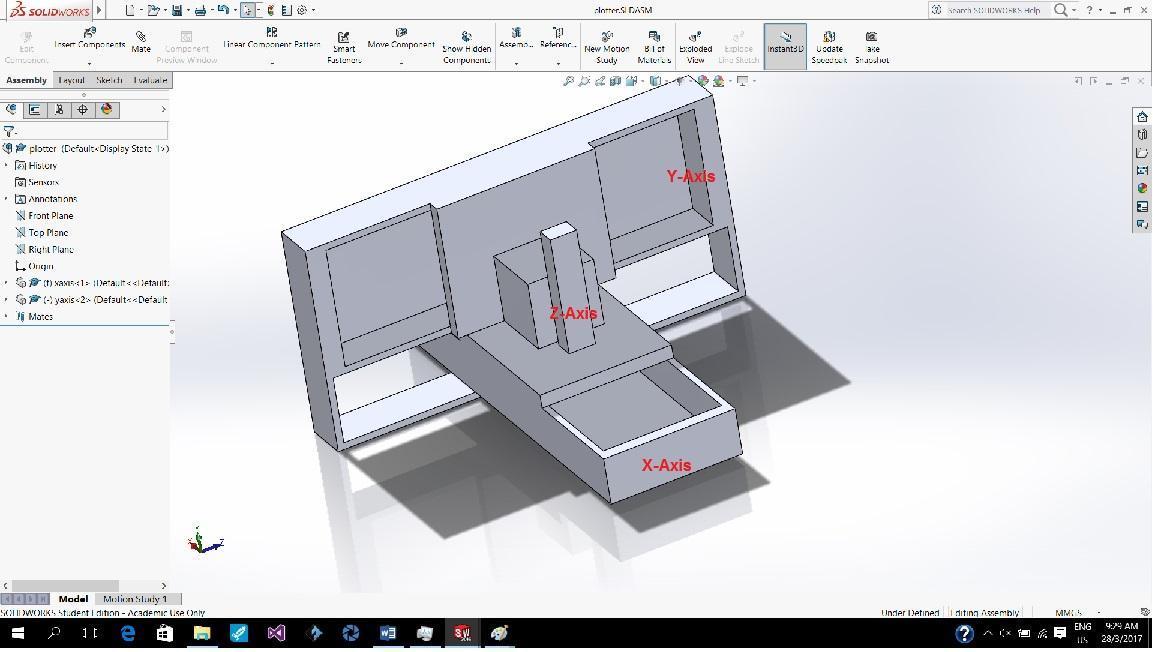
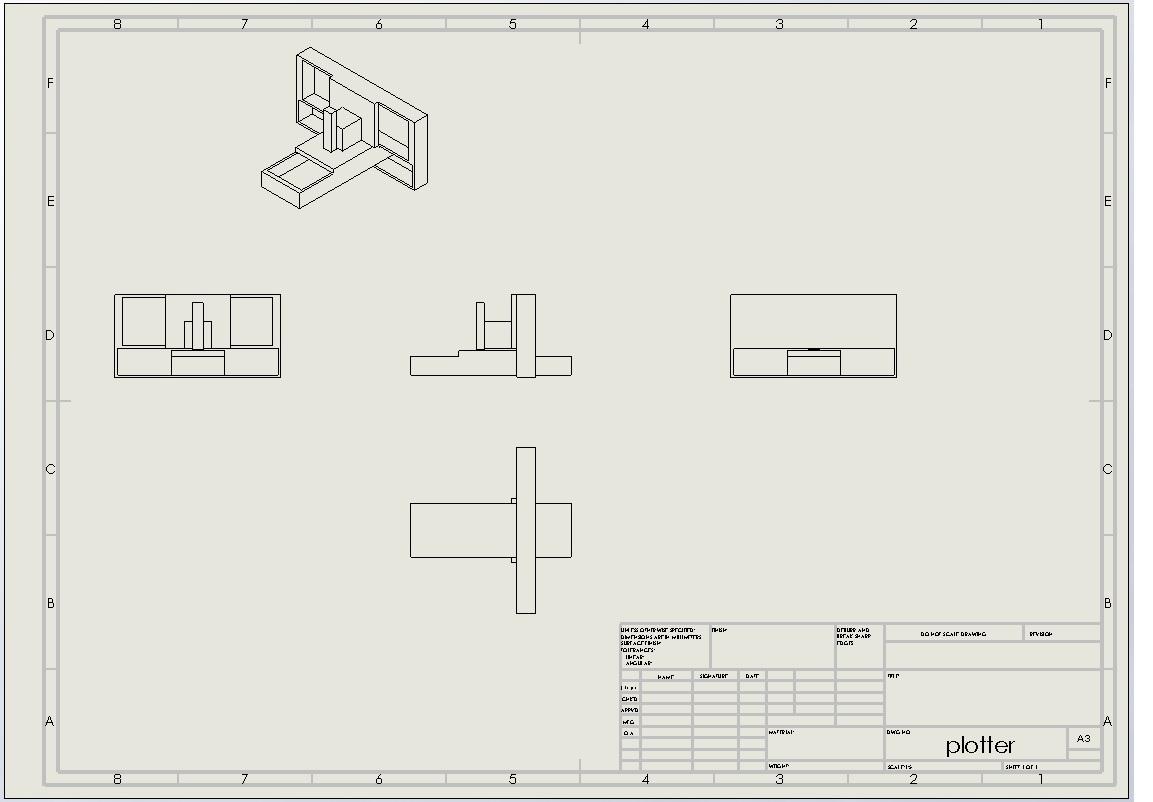
My contribution to the project is the plotter main system concept design drawing and Z axis or the pen up-down holder.
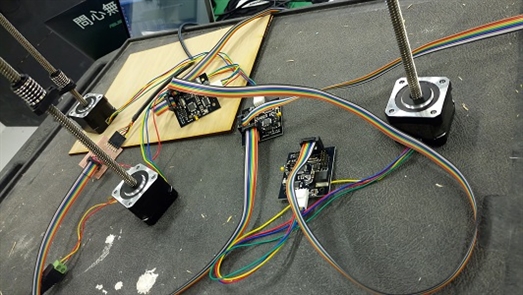
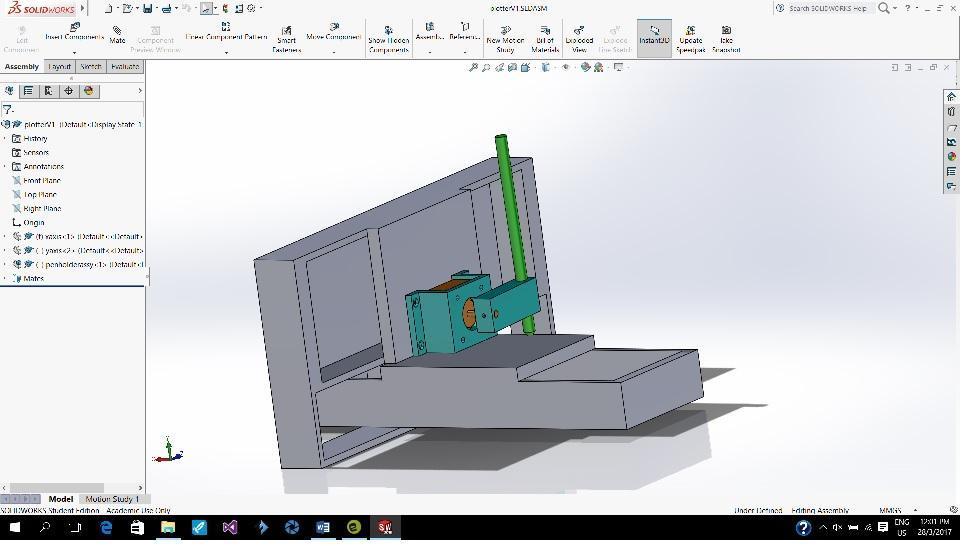
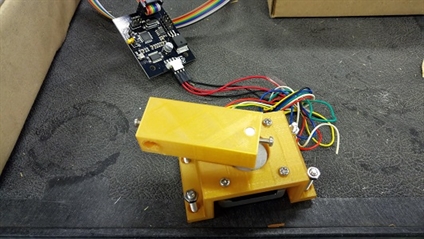
The conceptual diagram of the mechanical design is shown below. The design consists of 2 MTM slides forming the x axis at the bottom moving back and forth, the y axis at the top moving left and right and the z axis moving up and down holding a pen. All the axes use NEMA 17 stepper motors and will be driven by gastaut stepper motor driver nodes. These nodes are tethered to a multi-drop RS485 network linked connected to a FabNet board, which itself connects to a PC via a RS485-USB cable. The PC will be running pygasaut software within the Python interpreter.
The conceptual diagram of the mechanical design is shown below. The design consists of 2 MTM slides forming the x axis at the bottom moving back and forth, the y axis at the top moving left and right and the z axis moving up and down holding a pen. All the axes use NEMA 17 stepper motors and will be driven by gastaut stepper motor driver nodes. These nodes are tethered to a multi-drop RS485 network linked connected to a FabNet board, which itself connects to a PC via a RS485-USB cable. The PC will be running pygasaut software within the Python interpreter.
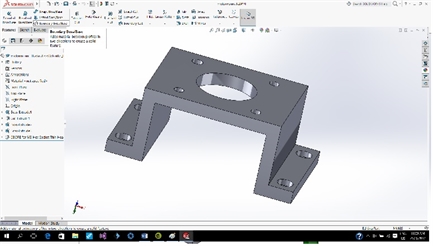
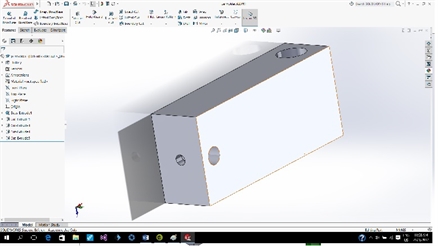
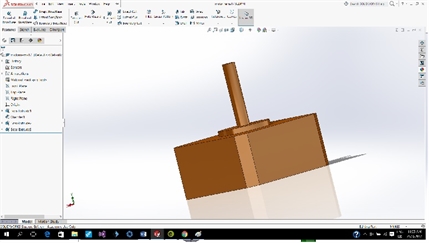
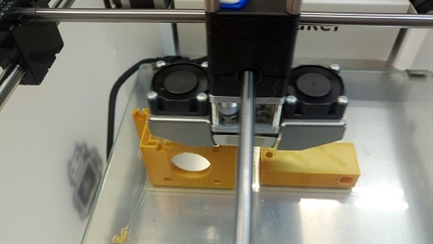
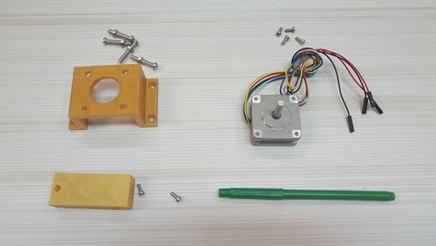
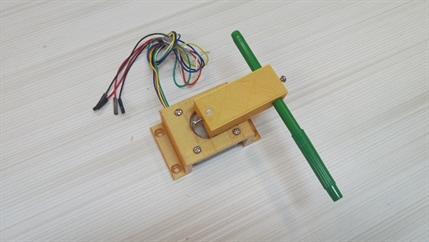
The Z axis or the pen up-down holder. It consists of the following parts:
Stepper motor holder
Pend holder
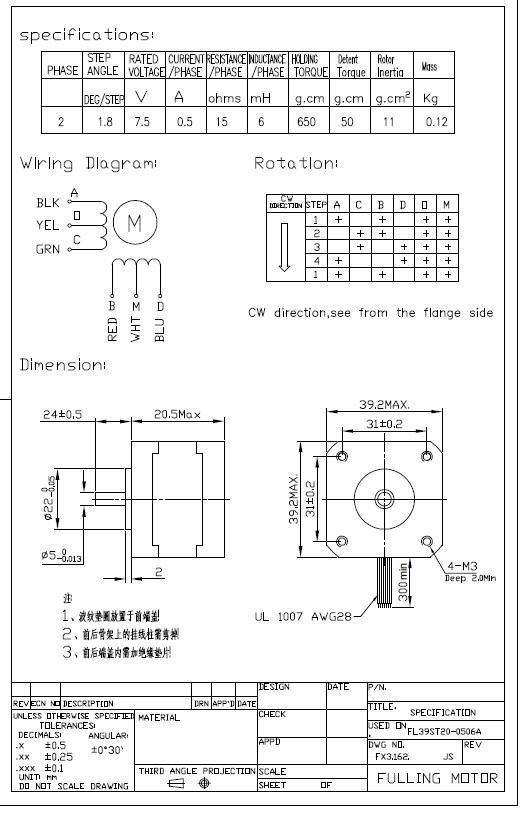
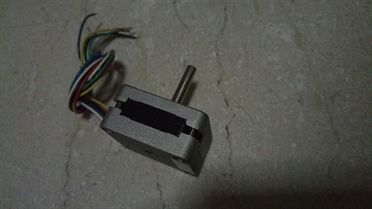
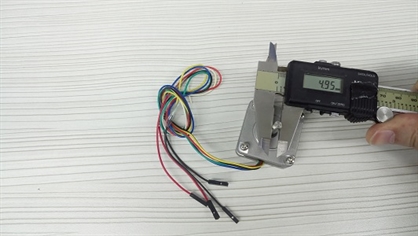
The design was done in Solidworks and parts was 3D printed. I will not use the MTM slide module's stepper because the lead screw cannot be removed. Instead, I will use a normal NEMA stepper model FL39ST20 2 phase stepper instead without the lead screw. The datasheet of FL39ST20 is shown below.
Stepper motor holder
Pend holder
The design was done in Solidworks and parts was 3D printed. I will not use the MTM slide module's stepper because the lead screw cannot be removed. Instead, I will use a normal NEMA stepper model FL39ST20 2 phase stepper instead without the lead screw. The datasheet of FL39ST20 is shown below.
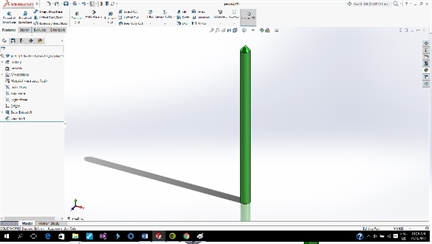
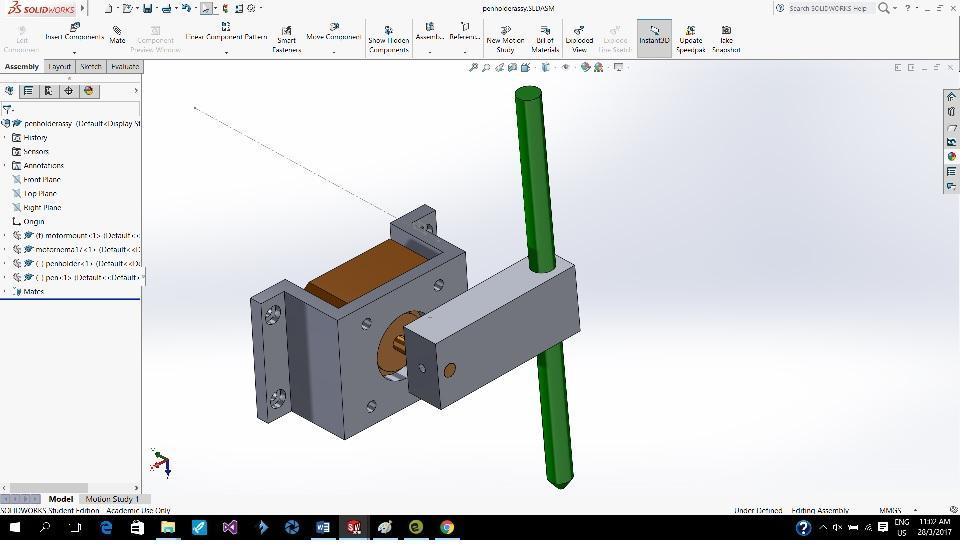
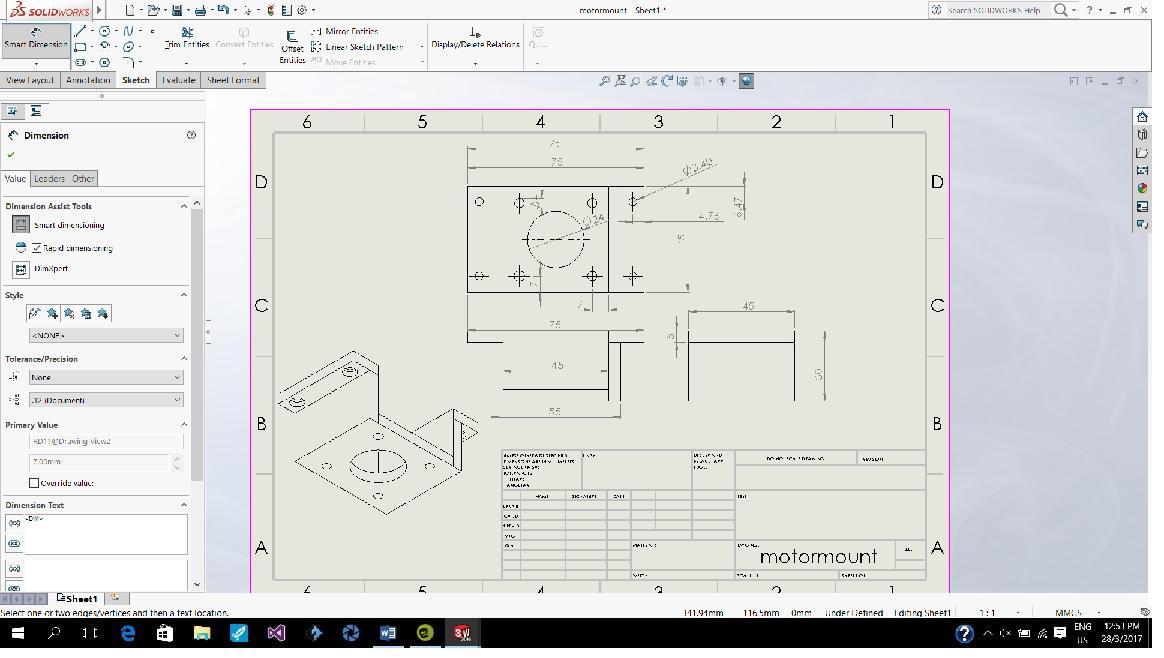
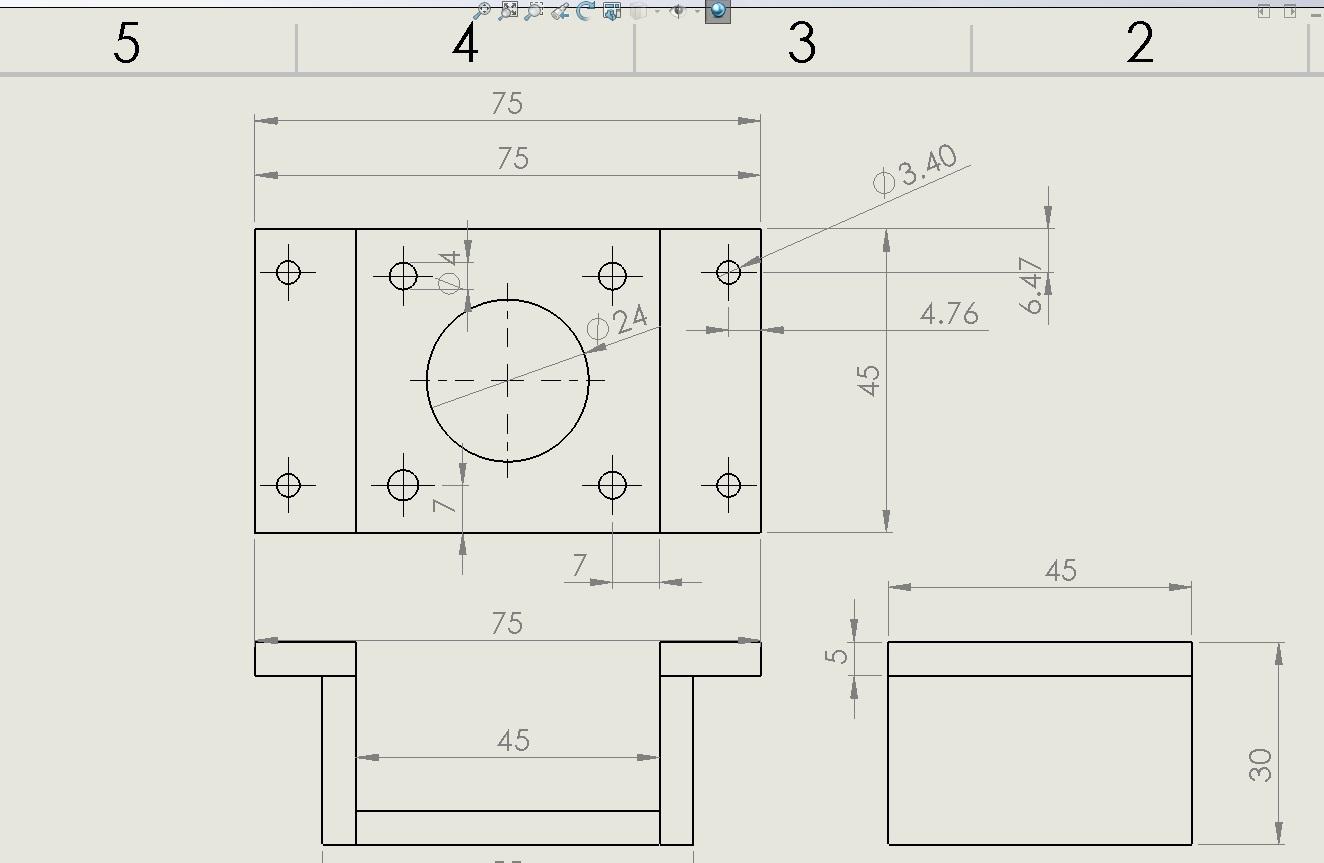
Not all of my team mates are using Solidworks, so to collaborate with each other for design changes, we exchange part drawings such as the one below we can work on the assembly of different parts.

Reflection
It been fun working together with my team mates. Poeple with different skill sets come together can get thing done faster and more efficient.
It been fun working together with my team mates. Poeple with different skill sets come together can get thing done faster and more efficient.