Applications and implications
Assignment
Propose a final project that integrates the range of units covered, answering:
What will it do?
Who's done what beforehand?
What materials and components will be required?
Where will they come from?
How much will it cost?
What parts and systems will be made?
What processes will be used?
What tasks need to be completed?
What questions need to be answered?
What is the schedule?
How will it be evaluated?
Projects can be separate or joint, but need to show individual mastery
of the range of skills covered
Where possible, you should make rather than buy the parts of your project
Propose a final project that integrates the range of units covered, answering:
What will it do?
Who's done what beforehand?
What materials and components will be required?
Where will they come from?
How much will it cost?
What parts and systems will be made?
What processes will be used?
What tasks need to be completed?
What questions need to be answered?
What is the schedule?
How will it be evaluated?
Projects can be separate or joint, but need to show individual mastery
of the range of skills covered
Where possible, you should make rather than buy the parts of your project
Final project proposal
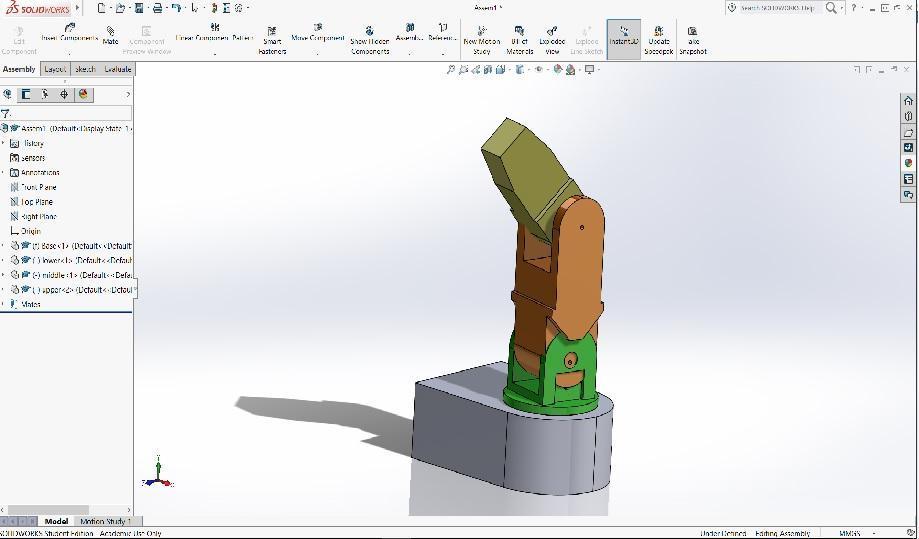
My final project is making of a robotic arm.
What will it do?
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The terminus of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand.
Who’s done what beforehand?
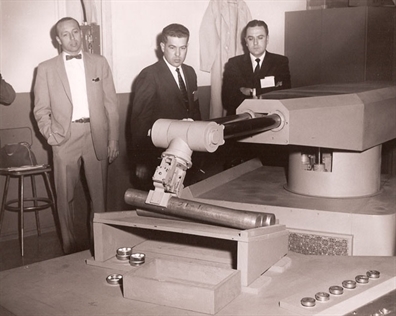
The first robotic arm was installed at the General Motors plant
in Ewing Township, New Jersey in 1962. It was named 'Unimate' and was created by
George Devol. It's task was lifting and stacking hot metal parts. The arm
weighed about 1,815 kilograms and cost $25,000. Before this, robotics were
largely the products of science fiction and the imagination. The development of
robotics was slow for a while, with many of the most useful applications being
involved with space exploration, until the late 1970s when several big Japanese
conglomerates began producing similar industrial
robots.
In 1969 Victor Scheinman at Stanford University invented the
Stanford arm, an all-electric, 6-axis articulated robot designed to permit an
arm solution. This allowed it accurately to follow arbitrary paths in space and
widened the potential use of the robot to more sophisticated applications such
as assembly and welding.
Industrial robotics took off quite quickly in Europe. ABB
Robotics (formerly ASEA) introduced IRB 6, among the world's first commercially
available all electric micro-processor controlled robot. The first two IRB 6
robots were sold to Magnusson in Sweden for grinding and polishing pipe bends
and were installed in production in January 1974. Also in 1973 KUKA Robotics
built its first robot, known as 'FAMULUS', also one of the first articulated
robots to have six electromechanically driven axes. Interest in robotics
increased in the late 1970s and many US companies entered the field, including
large firms like General Electric, and General Motors. Only a few non-Japanese
companies ultimately managed to survive in this
market.
After Henry Ford invented the assembly line, the construction of
automobiles, cars and trucks remained unchanged throughout most of the 20th
century. The use of robots to aid in industrialization weren’t fully realized
until the 1980s, when robotic arms began to be integrated in automobile and
other manufacturing assembly lines.
Robots were initially retained to perform precise welding chores
and other repetitive tasks that humans had long found boring, monotonous and
injurious. By using robots to weld, handle dangerous objects and place items,
auto manufacturers were able to ensure a consistent product with a minimum of
worker injury. Currently, 50 percent of all robots in use today are used in
automobile manufacture. The latest development is collaborative robotic arm
in which collision sensors are built. As such when the robot arm touches object
during movement. It immediately stops.
what materials and components will be required?
Hardware
o Microcontroller Atmega328Pchip
o A4988 stepper driver modules
o AVRISPSMD
o FTDI-SMD-HEADER
o Nema17 Stepper motors
o Crystal 16Mhz
o 5V power supply
o 9V power supply
o Radial bearings
o Flange bearings
o Thrust bearing
o Bolts and nuts
Software
o Arduino IDE
o Microsoft .Net visual studio
o Putty
Mechanical
o Laser cut Acrylic sheet
o 3D Printing PLA connection parts
where will they come from?
o Local electronic vender
o Taobao
o wood suply
o acrylic supplier
o Inventory from our fablab
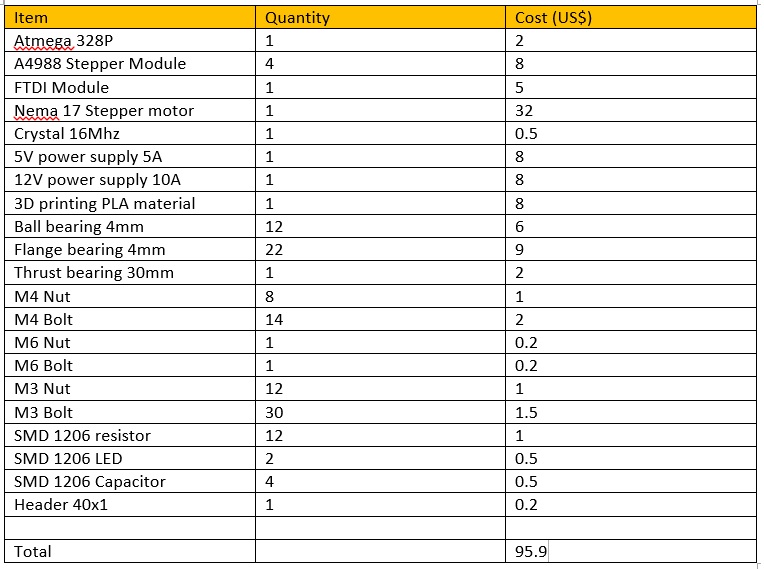
How much will it cost?
what parts and systems will be made?
o the circuit
o the program
o the mechanical arm
what processes will be used?
o Project plan (Week1, Week17)
o Design the circut (Week6 - Electronics Design)
o Make the PCB (Week4 - Electronic Production)
o Make the circut (Week8 - Embedded Programming, Week11 - Input Devices, Week13 - Output Devices, Week15 - Networking and Communications)
o Test the instrument (Week16 - Interface and Application Programming)
o Design the housing (Week2 - CAD, Week9 - Mechanical Design, Week10 - Machine Design)
o Make the housing (Week3 - Computer-controlled cutting, Week7 - Computer-controlled machining)
o Assembly and test
what tasks need to be completed?
o design A4988 stepper driver module carrier
o design schematic in eagle
o design board in eagle
o buy components
o mill the borad
o soldering
o coding
o test input & output part
o design housing parts
o making housing parts
o assemble
o test
What questions need to be answered?
o Repeatability and accuracy?
o Is PLA 3D printing a good process for making gear?
what is the schedule?
o Study overall design(5.31-5.30)
o design schematic in eagle and mechanical in Solidworks(5.31)
o design board in eagle (6.01)
o buy components (6.02)
o mill the board and assemble the mechanical parts (6.03)
o soldering (6.04)
o coding (6.05-6.06)
o test input & output part (6.07)
o design movement(6.08-6.09)
o making movemtent (6.10-6.11)
o assemble (6.12)
o test (6.13-6.14)
How will it be evaluated?
o Motion smoothness
- Severe vibration during motion
- Able to stop without swing back and forth
o Position repeatability
-Able to constatantly pick and place something over and over again from the same places
o Ability to pick and place a small object (such as paper ball or better)
- Able to hold something using a gripper
My final project is making of a robotic arm.
What will it do?
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The terminus of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand.
Who’s done what beforehand?
The first robotic arm was installed at the General Motors plant
in Ewing Township, New Jersey in 1962. It was named 'Unimate' and was created by
George Devol. It's task was lifting and stacking hot metal parts. The arm
weighed about 1,815 kilograms and cost $25,000. Before this, robotics were
largely the products of science fiction and the imagination. The development of
robotics was slow for a while, with many of the most useful applications being
involved with space exploration, until the late 1970s when several big Japanese
conglomerates began producing similar industrial
robots.
In 1969 Victor Scheinman at Stanford University invented the
Stanford arm, an all-electric, 6-axis articulated robot designed to permit an
arm solution. This allowed it accurately to follow arbitrary paths in space and
widened the potential use of the robot to more sophisticated applications such
as assembly and welding.
Industrial robotics took off quite quickly in Europe. ABB
Robotics (formerly ASEA) introduced IRB 6, among the world's first commercially
available all electric micro-processor controlled robot. The first two IRB 6
robots were sold to Magnusson in Sweden for grinding and polishing pipe bends
and were installed in production in January 1974. Also in 1973 KUKA Robotics
built its first robot, known as 'FAMULUS', also one of the first articulated
robots to have six electromechanically driven axes. Interest in robotics
increased in the late 1970s and many US companies entered the field, including
large firms like General Electric, and General Motors. Only a few non-Japanese
companies ultimately managed to survive in this
market.
After Henry Ford invented the assembly line, the construction of
automobiles, cars and trucks remained unchanged throughout most of the 20th
century. The use of robots to aid in industrialization weren’t fully realized
until the 1980s, when robotic arms began to be integrated in automobile and
other manufacturing assembly lines.
Robots were initially retained to perform precise welding chores
and other repetitive tasks that humans had long found boring, monotonous and
injurious. By using robots to weld, handle dangerous objects and place items,
auto manufacturers were able to ensure a consistent product with a minimum of
worker injury. Currently, 50 percent of all robots in use today are used in
automobile manufacture. The latest development is collaborative robotic arm
in which collision sensors are built. As such when the robot arm touches object
during movement. It immediately stops.
what materials and components will be required?
Hardware
o Microcontroller Atmega328Pchip
o A4988 stepper driver modules
o AVRISPSMD
o FTDI-SMD-HEADER
o Nema17 Stepper motors
o Crystal 16Mhz
o 5V power supply
o 9V power supply
o Radial bearings
o Flange bearings
o Thrust bearing
o Bolts and nuts
Software
o Arduino IDE
o Microsoft .Net visual studio
o Putty
Mechanical
o Laser cut Acrylic sheet
o 3D Printing PLA connection parts
where will they come from?
o Local electronic vender
o Taobao
o wood suply
o acrylic supplier
o Inventory from our fablab
How much will it cost?
what parts and systems will be made?
o the circuit
o the program
o the mechanical arm
what processes will be used?
o Project plan (Week1, Week17)
o Design the circut (Week6 - Electronics Design)
o Make the PCB (Week4 - Electronic Production)
o Make the circut (Week8 - Embedded Programming, Week11 - Input Devices, Week13 - Output Devices, Week15 - Networking and Communications)
o Test the instrument (Week16 - Interface and Application Programming)
o Design the housing (Week2 - CAD, Week9 - Mechanical Design, Week10 - Machine Design)
o Make the housing (Week3 - Computer-controlled cutting, Week7 - Computer-controlled machining)
o Assembly and test
what tasks need to be completed?
o design A4988 stepper driver module carrier
o design schematic in eagle
o design board in eagle
o buy components
o mill the borad
o soldering
o coding
o test input & output part
o design housing parts
o making housing parts
o assemble
o test
What questions need to be answered?
o Repeatability and accuracy?
o Is PLA 3D printing a good process for making gear?
what is the schedule?
o Study overall design(5.31-5.30)
o design schematic in eagle and mechanical in Solidworks(5.31)
o design board in eagle (6.01)
o buy components (6.02)
o mill the board and assemble the mechanical parts (6.03)
o soldering (6.04)
o coding (6.05-6.06)
o test input & output part (6.07)
o design movement(6.08-6.09)
o making movemtent (6.10-6.11)
o assemble (6.12)
o test (6.13-6.14)
How will it be evaluated?
o Motion smoothness
- Severe vibration during motion
- Able to stop without swing back and forth
o Position repeatability
-Able to constatantly pick and place something over and over again from the same places
o Ability to pick and place a small object (such as paper ball or better)
- Able to hold something using a gripper