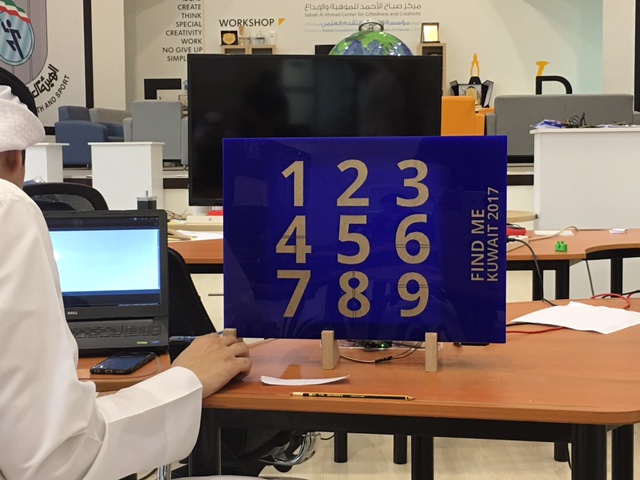
The assignment for this week is to work in a team to start a mechanical machine based project with at least 2 axis motion. The group of fab-lab Kuwait include 14 students. we decide to take the project into different phases. here is a final Poster and a video of the project
Project Phases
The project was divided into diffrent phases between the brainstorming, planning , design and excution including the trial & error or testing phase.
Phase-1 : Structuring forming, roles assignment and brainstorming
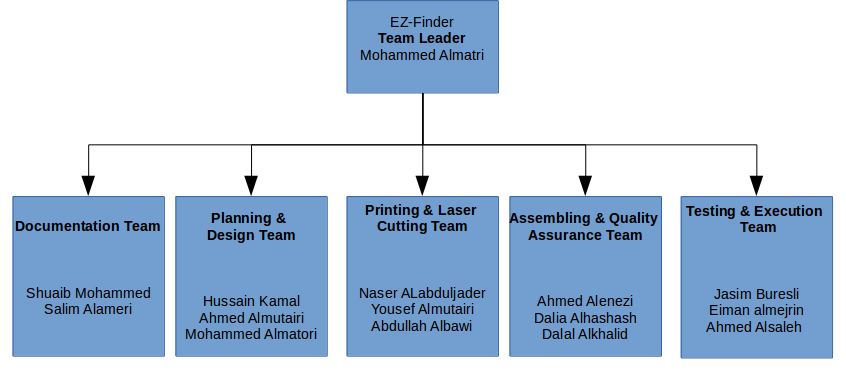
The outcome of his phase is to work and communicate effectively in a team given the limited time to complete the assignment. The first step the group has decided to do is to select a leader to make sure that all roles assigned to the members are completed on time. The EZ-Finder team includes the following:
Team members
Abdullah Al-Bawi
Ahmad Al-Anezi
Ahmad Al-mutairi
Ahmad Alsaleh
Dalal Alkhalid
Dalia Al-Hashash
Eman Al-mejrn
Hussain Kamal
Jassem Bouresli
Mohammad Al-Matori
Naser Al-Abduljader
Salem Al-Ameeri
Shuaib Shuaib
Yousef Al-mutairi
Roles & Responsibility:
1) Project Leader: the project leader is also one of the design team members. His role is to assure that all the requirement of the fab lab for this week is smoothly done. The leader will also in charge of the communication process among the member of different teams since the trial and error is possible between design and assembling team.
2) Documentation Team: This team is in charge of documenting the process of the project. Documenting include write ups, videos, pictures and posting the final report on the server and share it with the team. Once the report is done for each phase, the responsible team to review the report that is done by the documentation team prior posting it on the server.
3) Planning & Design Team: this team is initially in charge of the planning process of the whole project due to the experience they have in their fields. They have prepared a day to day plan with milestones to complete by the end of the week for each team. This team is also in charge of designing the project and all the pieces required to complete the design. The logo is also designed within this team
4) Printing & Laser Cutting Team: the role of this team is to assure that the process flows smoothly from the design team back to their team. Prior printing or cutting, a quick quality assurance check-up meeting is done including all teams once the design is completed. Communication is established through the project leader. If any comments or error occurred in this meeting, the design team will have to amend the required changes and meet again with the team members. This team will also print the Logo of the product in both 3D printer and sticker printer for branding purposes.
5) Assembling Quality Assurance Team: this team is in charge of putting all the pieces together after the cutting process, assuring the design went smoothly and the printing and cutting is effect. If not, the assembling team to report any error with the project leader to reflect the required changes or error in the design or cutting stage.
6) Testing & Execution Team: once all the process above is completed and verified, this team to complete the final step of the process which is the testing & execution. If any error occurred in this phase, the team should report it back to the project leader in order to fix any error.
Brain-Storming Session
The team has come up with different ideas in the brain storming session that included all members of each team. The concepts that the team came up with varied from realistic, possible to impossible. We have listed the ones that could be completed within the resources and time limitation that we had to complete the project. The filtered list is:
1) Customized 3D printer : was not selected due to its complexity
2) Cake Printer: a machine that prints on cakes for occasions. Must be very precise in printing. Not selected due to time constraints
3) Vending machine for men’s Beads: not selected due to the size of it.
4) Teddy Bear Crane/Claw Machine: not selected due to its complixity and lack of resources
5) FindMe: a soldering components frame that could be used for circuit components cabinet that allow the user to find the required component by typing the name of the component and an LED light will move in an X & Y axis to the required drawer.
Note: the team has voted to go with the project FindME. The reason behind selecting this project was the need in having such product in the lab we are working in. in the previous weeks, we have faced lots of obstacles by selecting the wrong elements into the circuits or not even finding the ones we were looking for. Having such a product would have been much of a help to us.
Phase-2: Design Process
Logo Design
the logo design team has produced 3 different logo designs for the product. The design selected using ink-scape software was the one shown in the begining of the report as the projet logo fr FindME.
Concept Design Sketch
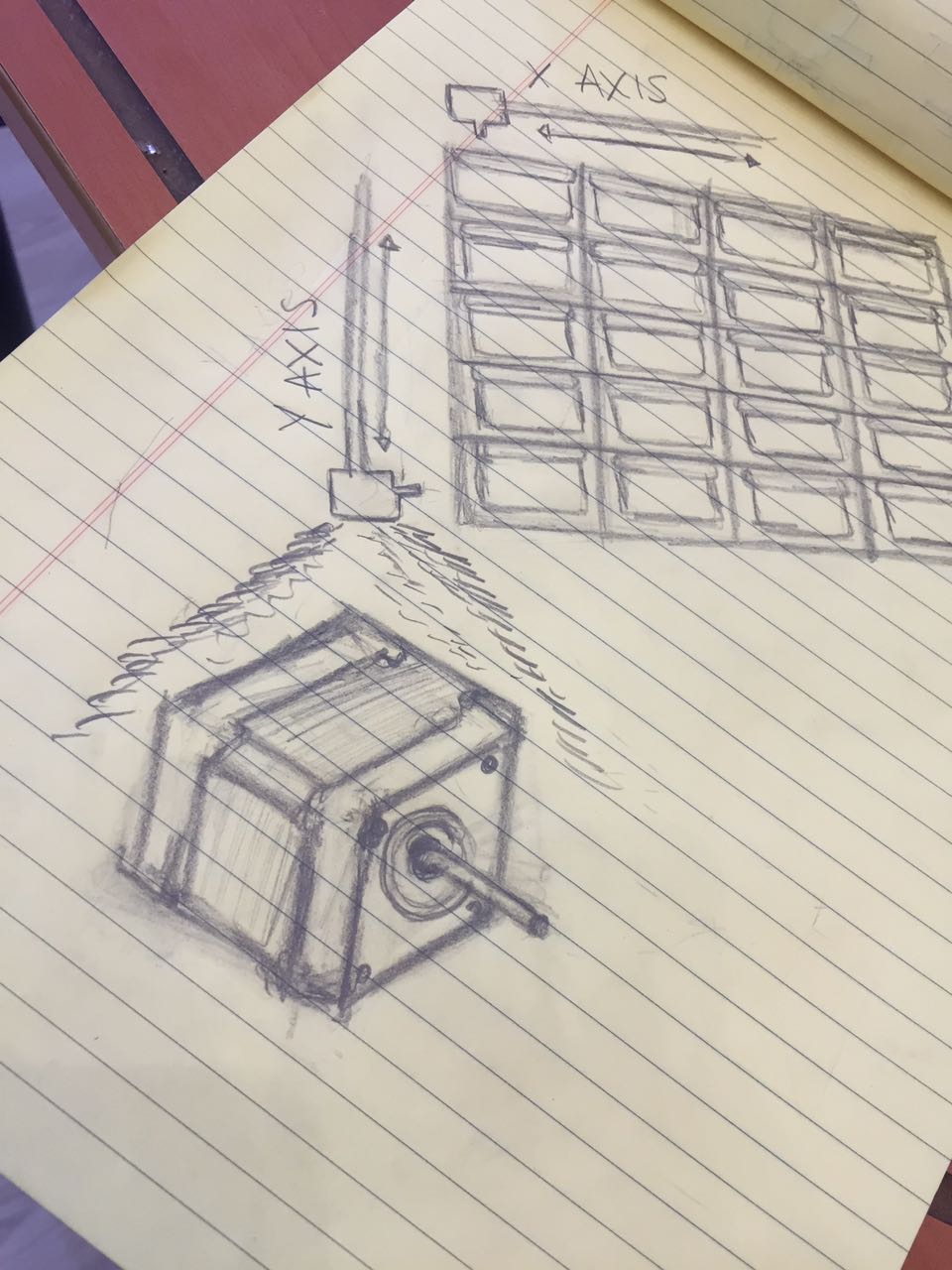
The concept design has started with sketching the possible idea that includes a mechanical stepper motor and a 2 axis X and Y. The design team sketched the stepper motor, the cabinet, the drawer and the way to move the motor in X & Y and assuring that the mechanical movement is dynamic with the final product. An LED light was also sketched in the concept design to show where the motor is stopping.
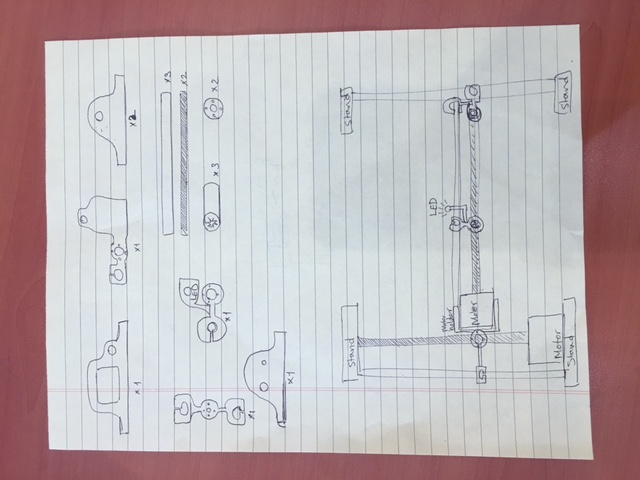
Then the team has thought of the possible pieces required to be part of the design in the concept phase. The team started with drawing the caps required that holds the stepper motors into the Rods. The concept that we thought of was something similar to the picture below. the team has also though of the possible pieces that is required for the design stage in order to print in 3D. below is the final number ofpieces required after few trial and error stages.
in the picture below, the design team was conceptualizing the whole idea on how the stepper motor could move into 2 axis (X & Y). the discussion here was about the number of Rods required on each axis to determine the number of holes needed to design the stepper motor holders and the cap as well.
Project Design
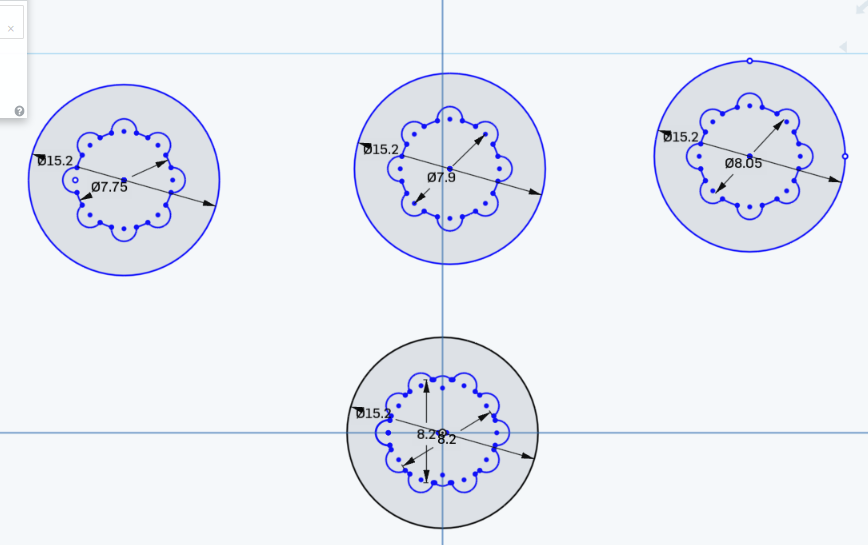
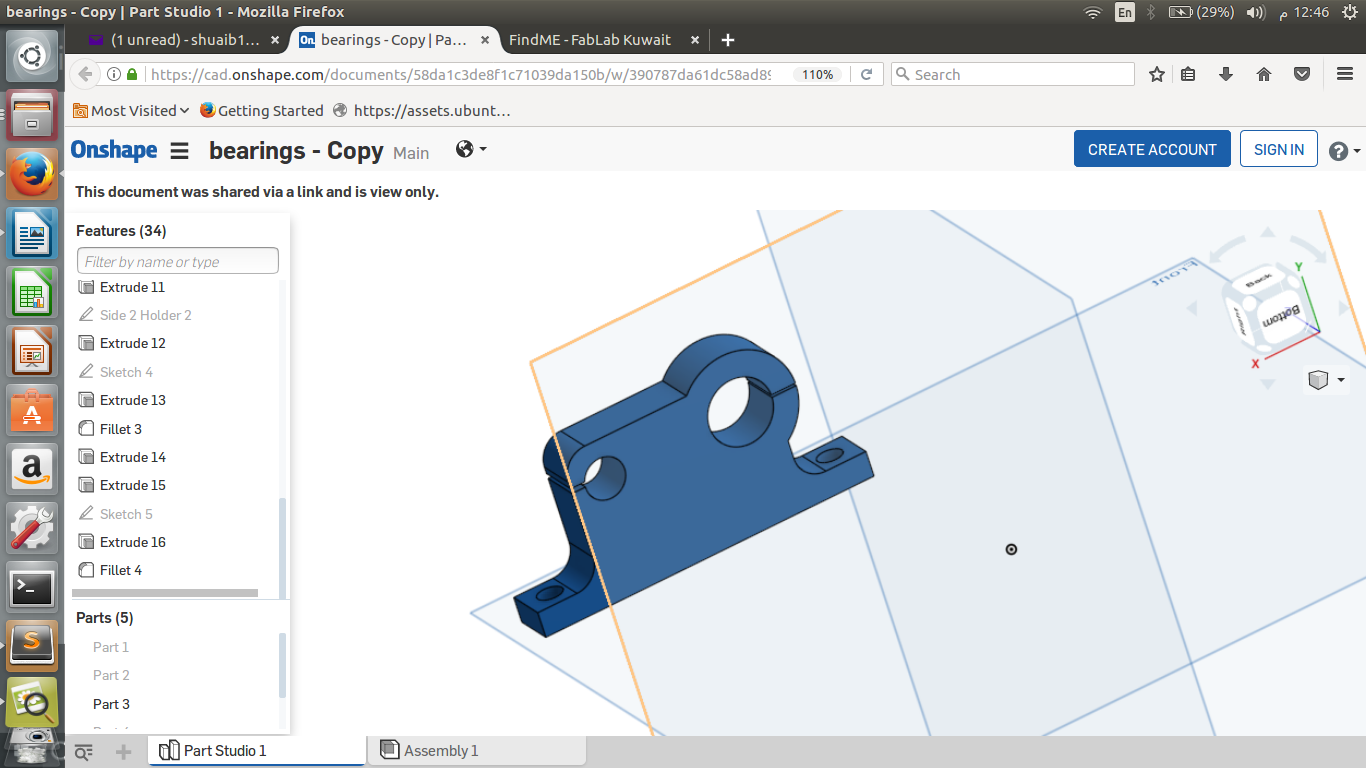
a) Bearing Design The bearing is required to assure that the friction of the mechanical movement is efficient in the movement of the motor. The design started with different type of radius until we assured that the radius fits the Rod. 3 pieces is required
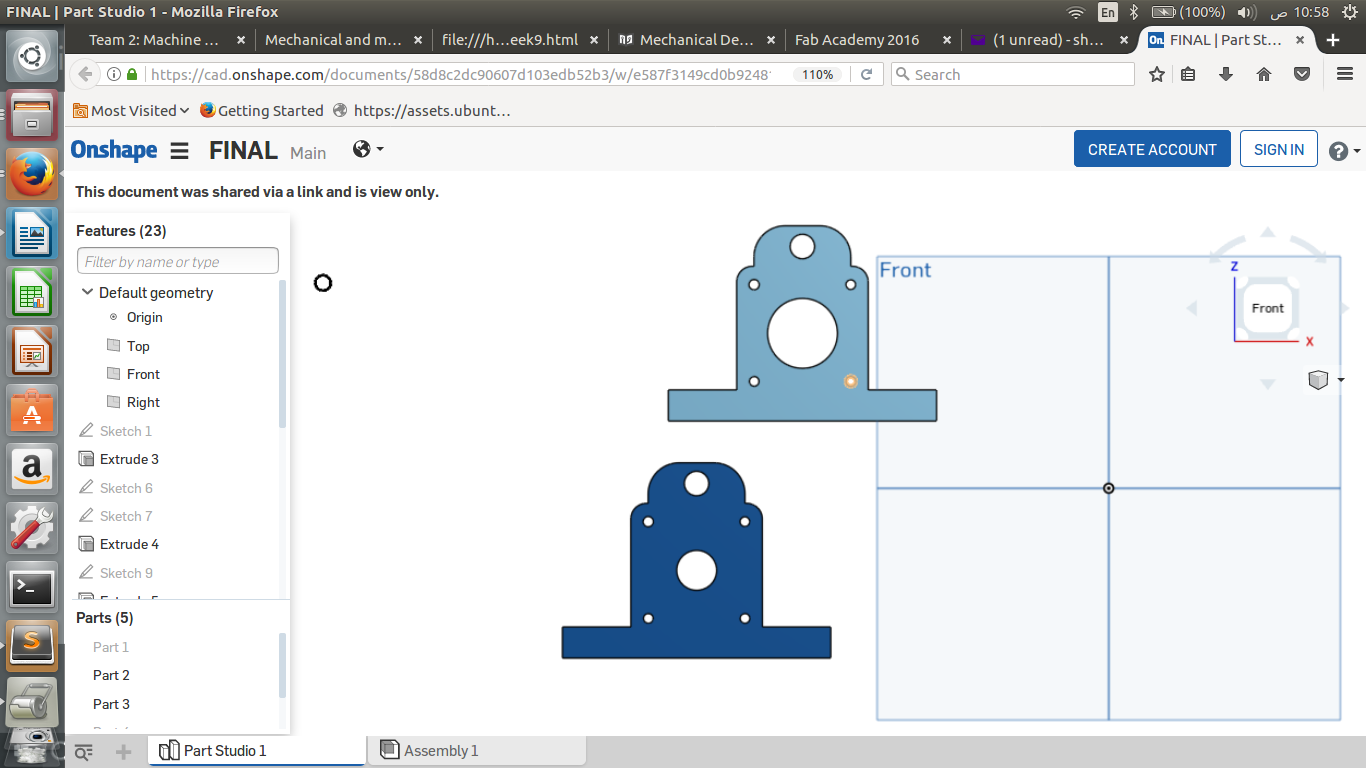
here is a top vie of the bearing pieces required in the design stage.
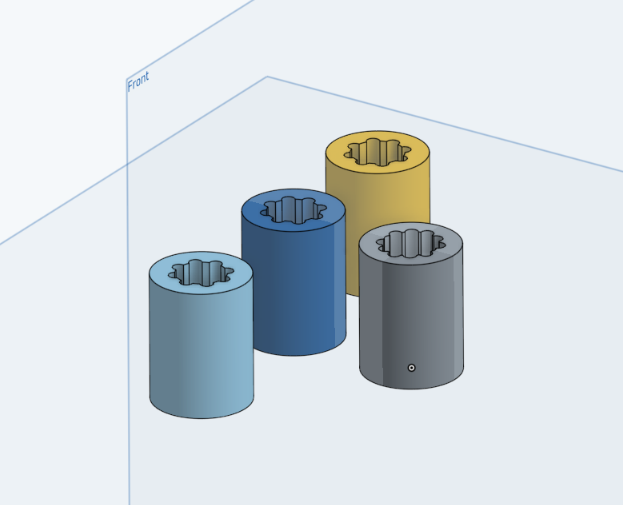
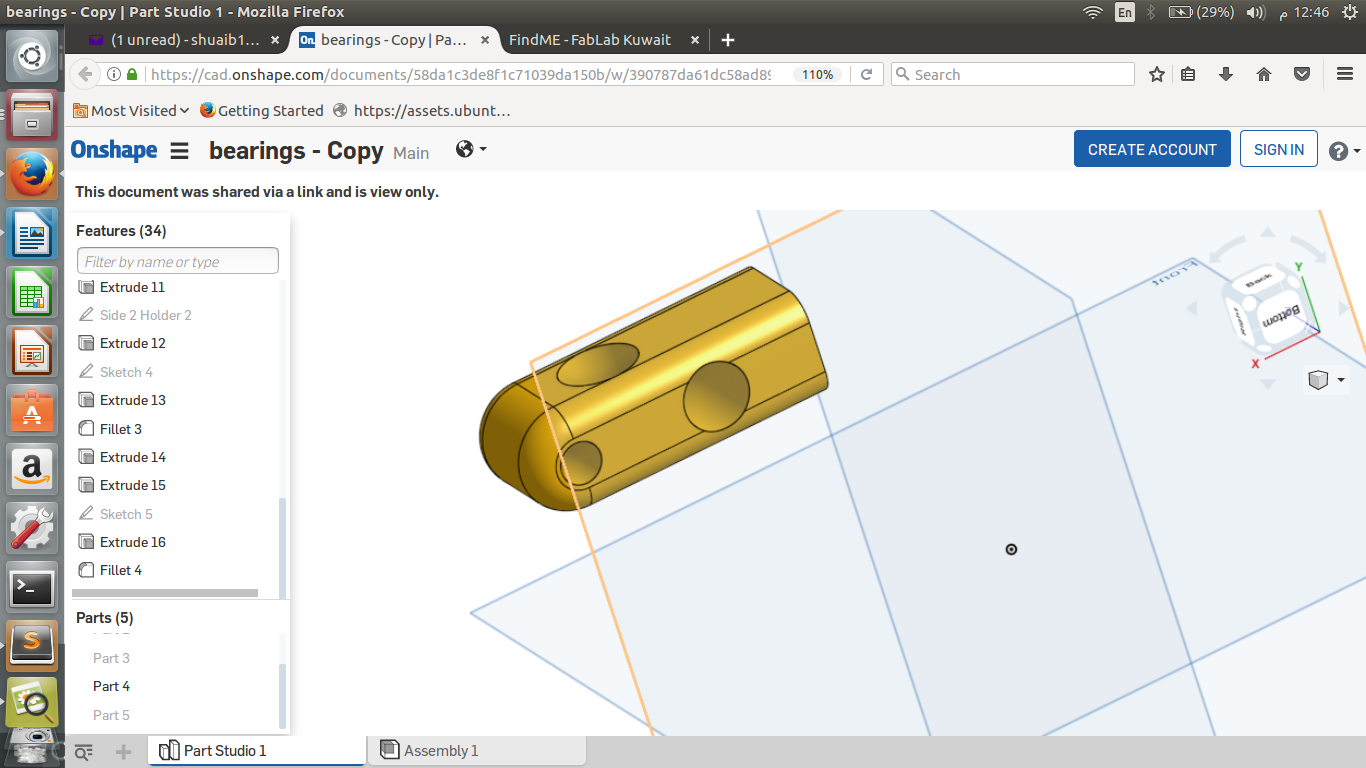
this is an extruded view of the bearing pieces that allows friction in the Rods to move smoothly as described abve.
b) LED Holder Design The part that holds the LED light and assure dynamic movement through the X and Y axis after the command is made.
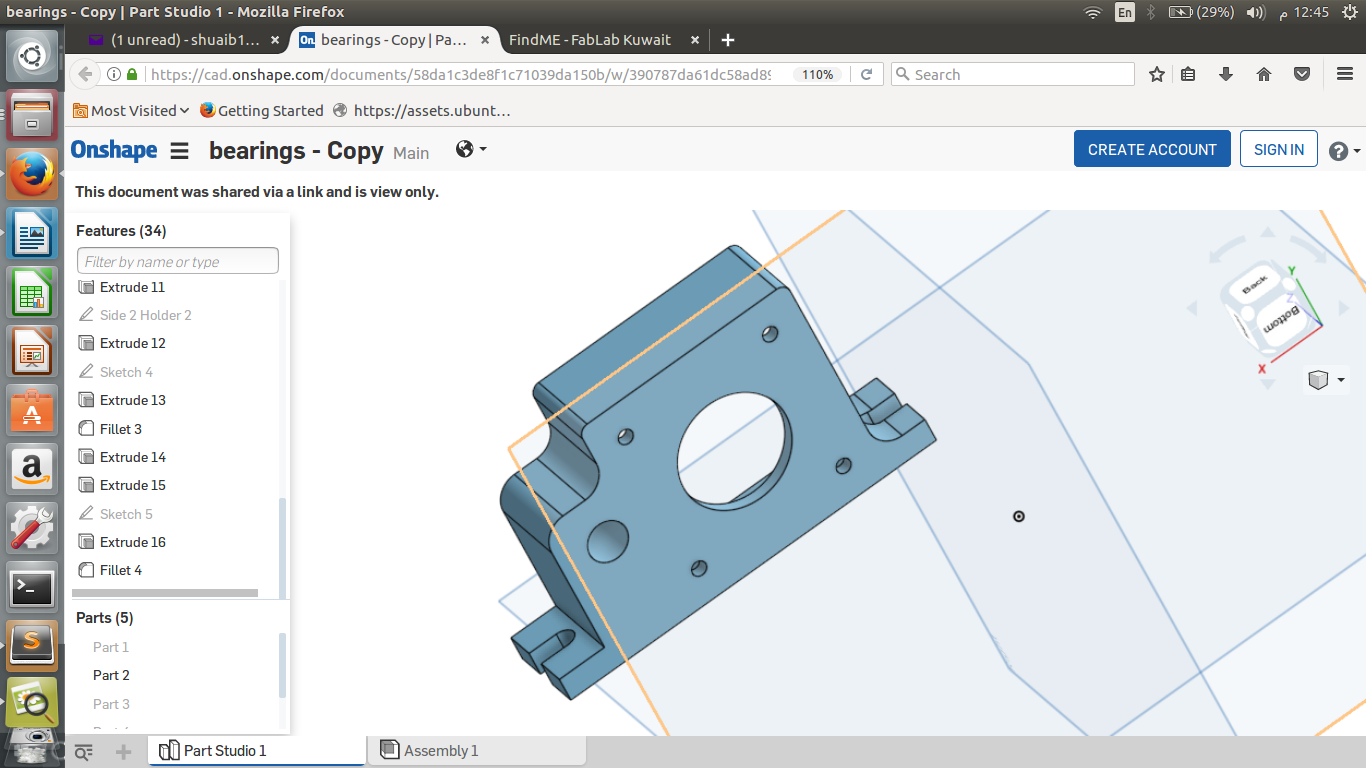
c) Stepper Motor holder - 1 it is the piece that holds the stepper motors into the Rods as sketched above in the concept design. Below are the dimensions used for both stepper motor caps. The first cap below will connect the Rod with the stepper motor. The 2nd cap will be placed at the other end of the Rod with a smaller radius than the 1st cap since there will not be a motor connected to it.
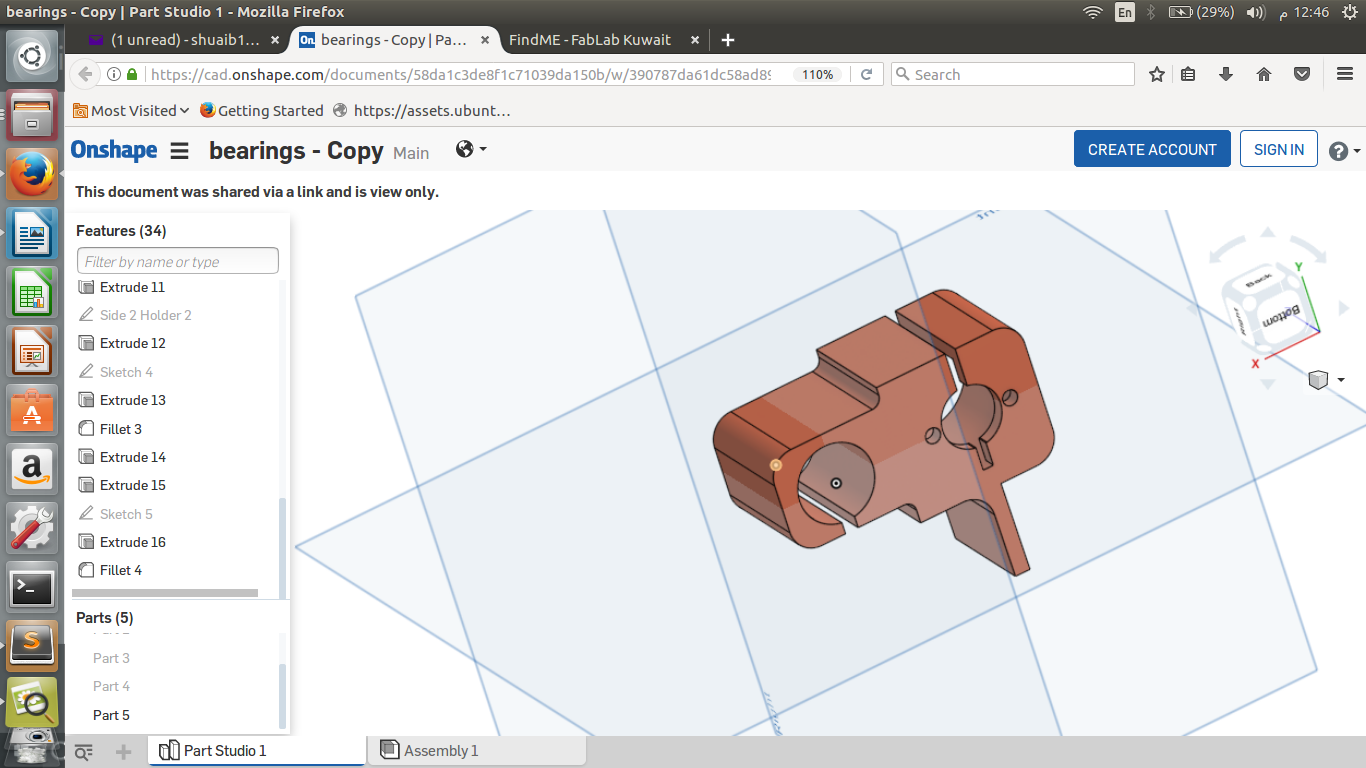
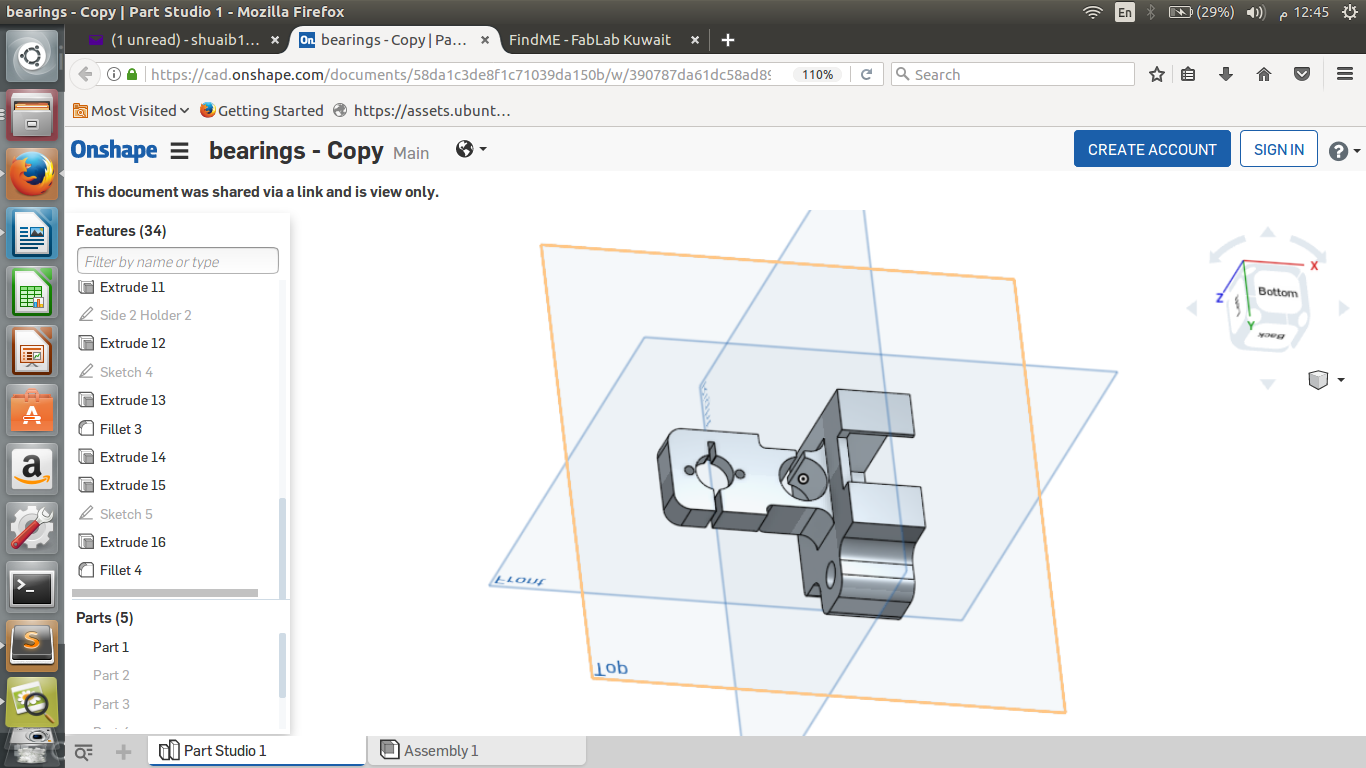
d) Stepper Motor holder - 2 it is the piece that connects the metal Rods with the stepper holders. Here is the final extruded design of the stepper motor holder (cap) that connects the motor with Rods.Thie piece is designed to be pined in the motor.
e) Rod Holder -1 this piece is designed t connect both Rods together in the X and Y axis. f) Rod Holder -2 this piece is designed t connect both Rods together in the X and Y axis.
g) Rod Holder -3
it is the holder that connects the Rods on the vertical moving axis
File used in the design Stage
STL Format in Onshape. please click on the link below o access onShape page and view the files.
For OnShape Design, Click HERE .
h) PCB holder Board
This board was designed to keep the wires organized and hold the stepper motors
The following is a list of materials or elements required to complete the project. these material were taken from old makerboat 3D printer and the following were taken from it:
Threaded Rod
Smooth Rod
Stepper Mottor
Stepper Mottor Drivers
Belts
Some of the Bearings
Phase-3: Printing, Cutting (as needed)
Laser cutting / Project 3D Printing
The laser cutting machine was out of service during the design of this project. So the design team has converted the files format and decided to take a risk in printing the required pieces in the 3D printer. The video posted earlier shows the 3D printing process for one of the pieces included in our design that applies in the rest of the elements.
here is a youtube link of the brainstorming, design process and printing stage
CNC Cutting (Failed Attempt – Machine was out of service as well)
below is the attempt we took to use the CNC cutting machine but the machine didnt work proprly and broke down.
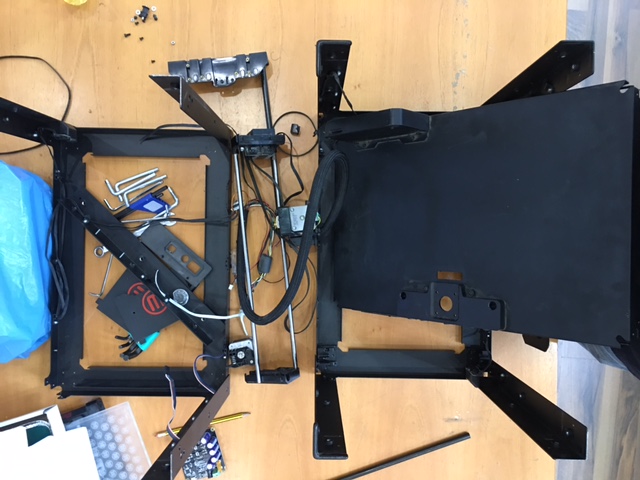
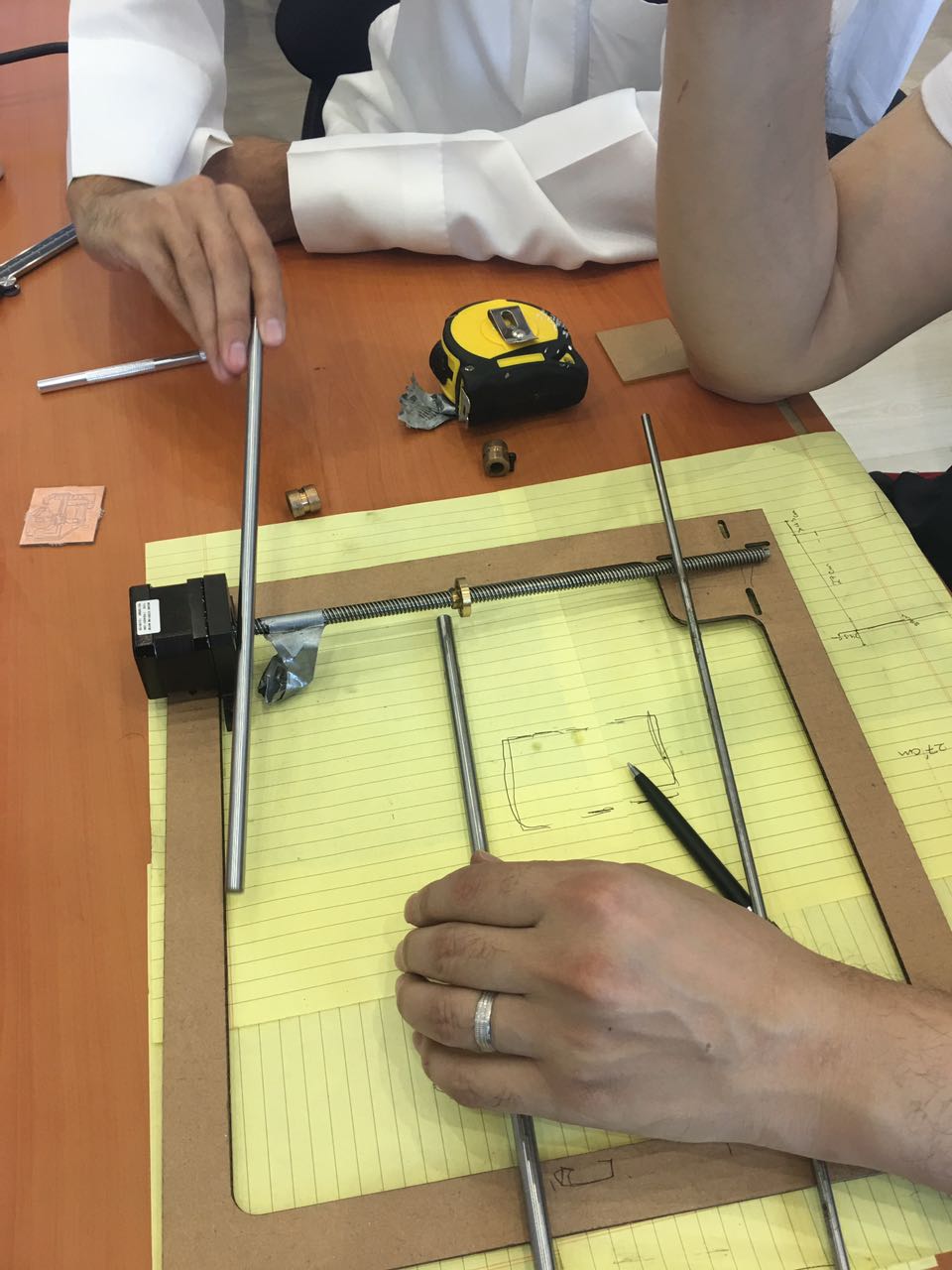
Phase-4: A- Assembling Process
the assembling process is where the trial and error took place. we had to redesign some of the Rod holders and the stepper motor cap when we came to this stage. the assembling team found out that the pieces designed do not fit the dynamic movement required for the X and Y axis to move smoothly. we have taken few videos and pictures to show the assembling process in details. click on the link below:
Problems Faced and how its solved
1) The first issue faced was that the laser cutting machine was out of service. So we tried to print the cap holders in a 3D printing machine and we will test the practicality of it before trying to fix the laser cutting machine.
2) Another issue found was the distance between the screw opening in the cap wasn't constant. The designers work on applying the same method and distances between the holes to assure that the cap fits on to of the motor.
3) The design team has added a new opening on top of the motor cap to insert a second pole to hold the movement of the motor through the axis. The team has failed in the beginning to find a balance of the moving motor.
4) the vibration of the stepper motor has caused shaking effect in the rod which prevent it from moving in the Y-axis. the design was improved to overcome this issue.
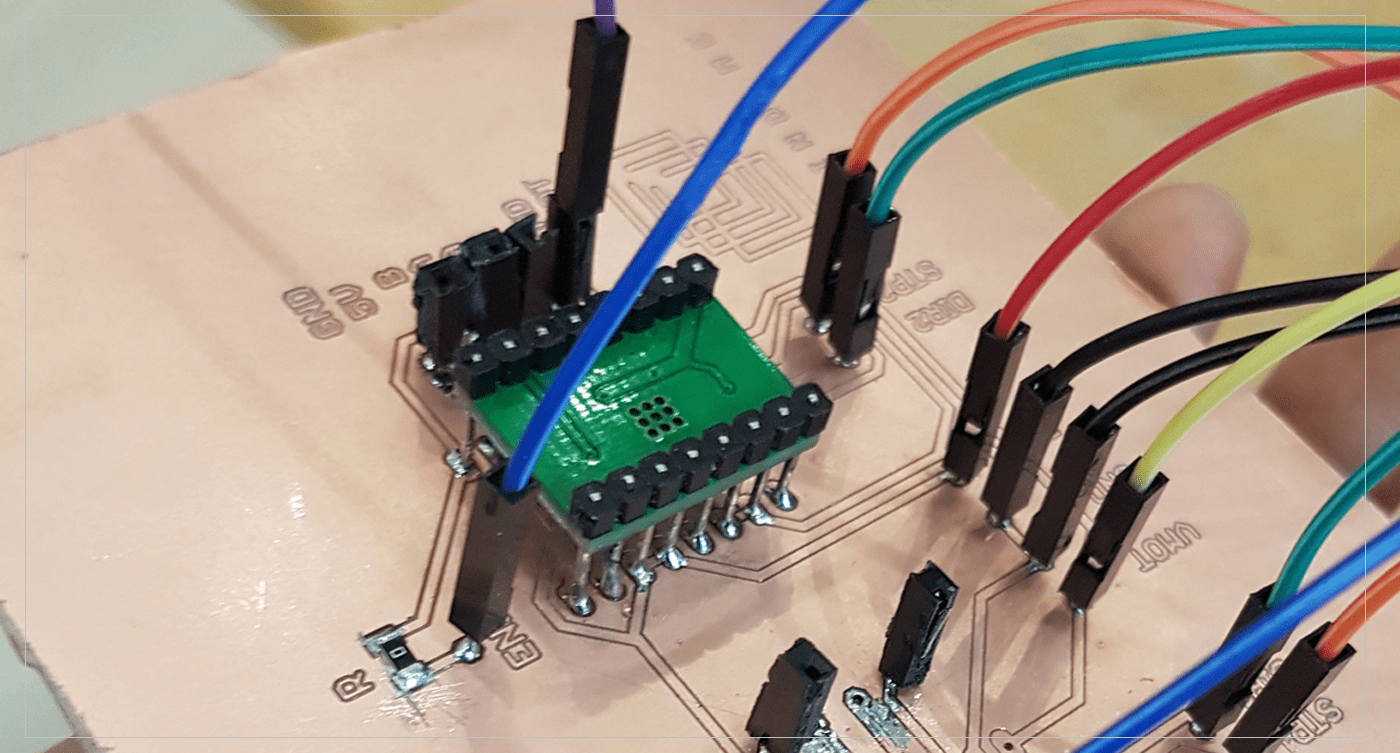
B- PCB design:
After checking that the machine was working smoothly, Assembly group have started to design a PCB for the Stepper driver wires to reduce the tangled wires and the use of the bread board .. the process starts with studying the pins of the stepper motor we are going to use and the connection needed for other wires.. The design process was straight forward by using Eagle Software, except for couple of problems like missing the stepper driver as a component in Eagle library,, so the solution we came up with was to use 2x 1*8pinheads and space them with about 13mm
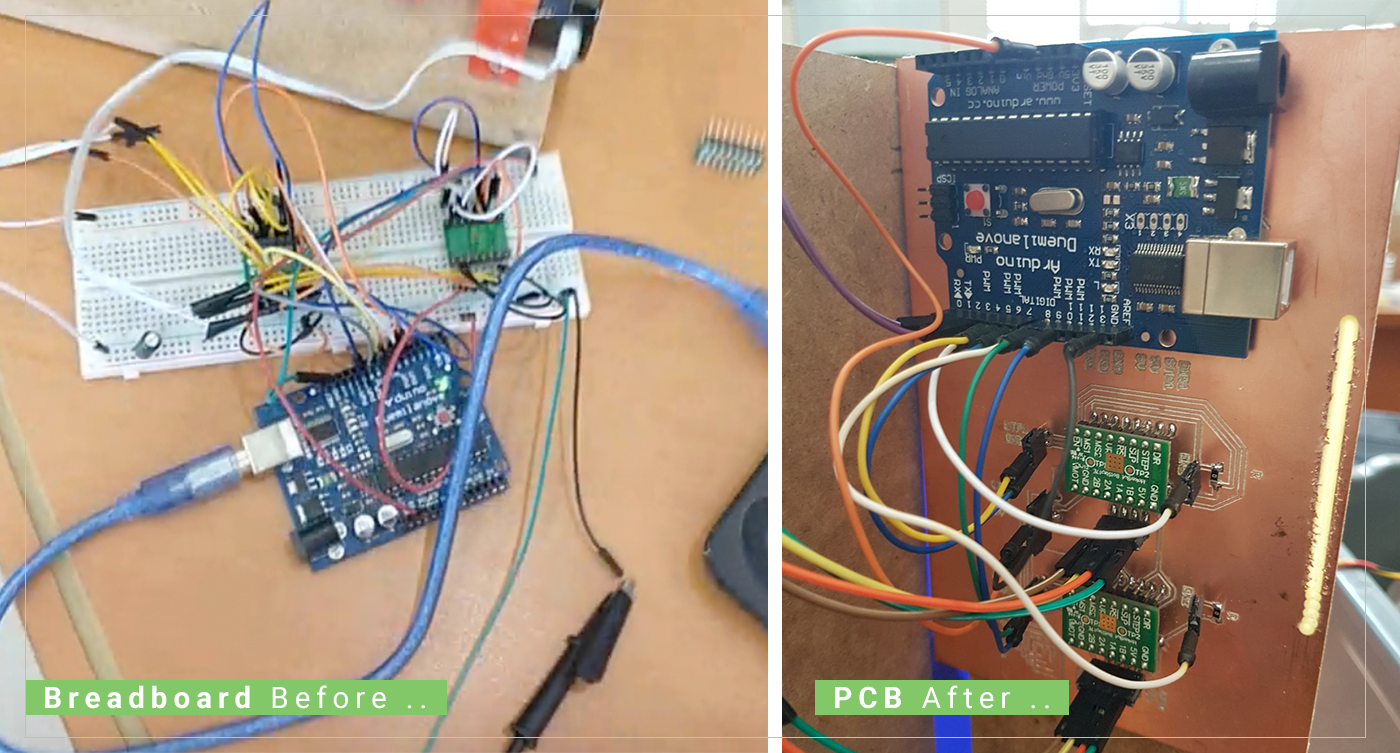
Future improvements:
After Completing the whole process,, We think that in the future it would be better to make our own PCB that contain all the connection on board, and we will not need to add external wires, it will make the project looks more professional. Moreover, it would be much better to have a box that contain all the electronics, as it would protect them and look neater,,
in this week we have found out that the design has the malfuncions. the weight of the moving stepper mototr of the X-axis is affection the movement of the LED light. The same Stepper motor movement is affecting the vertical movement of the rod. the rod is moving upward more on the steper motor side as seen in the video below
2nd Attempt- Belt Mechansim Test - Failed
as mentioned in the 1st attempt video, we have added a belt on the other side of the project as seen in the video below. we assumed that the belt would solve the flow of the movement on the other side of the prototype, but the belt wasnt suffiecient enough to allow such mechanisim. the test shows that the rod somehow moves downward due to gravity force only.
3rd Attempt- Removing the belt , Free Flow. Success
in this try, we have relised that we had to simplify the design. we apprached the brain string session with a redesign mentality from scratch. So we found out that the simpler the design is, the easier the LED would move. so we eleminated the right side of the project incuding the belt as well. see the video below.
here is the final run we did. we tested the LED light in connection with the location and the rod movement as well.
Listed future development opportunities
1) interfacing the FINDME with a mobile platform to request the demand
2) requesting the location in a tray pop-up style instead of an LED moving toward the tray. the limitation here was a transeparent treys and how to close the trey back into its original space
3) size of prject has also been one of our limititation since we thought that the project could be enlarged into a colour coorinated clothing cabenit for instance. the mechanical structure to scale the project in a bigger format is the main limitation in this scenario
4) Another future development is once the coponent is selected, the machine can place it where it is required to be. for instance, if we select an ATTINY45, the machine could read the component and place it in the exact location within the PCB.
5) pick and place concept could be developed in the future where we can pace the Resistors 1K ohm in an external trey for instance, and the machine would place it inside the Resistors 1K ohm trey.
6) Another point was disccused that the machine could read the PCB design itself, select the pieces required and place them in the exact loction on the milled PCB

 File used in the design Stage
File used in the design Stage