week 17
Applications & Implications
home
propose a final project
about me
The final project I am proposing is a small 6 Axis desktop robotic arm controlled from Grasshopper withing Rhinoceros. This will be functioning through inverse kinematics solver in C# within Grasshopper.
weekly work
what will it do ?
final project
It will be used for the basic understanding of use of robotics in architecture in a model scale. It is modeled after the standard 6-Axis robotic arm used in the industry.
contact
who's done what beforehand?
FabLab CEPT
From FabLab CEPT, Rudrapalsinh Solanki had tried one version of a robotic arm. It was one of its kind. Another student Kenny is presently making another robotic arm in this cycle of Fab Academy. In the comparison, Rudra has used servo motors which gives him a limited angle and Kenny is using a stepper motor which gives him a lot more control over the speed and angle.
Another project is well commendable here, its MicroPede. It uses the palletizing robotc arm model with inverse kinematics. It is powered with servo motors.
what materials and components will be required?
- The main material will be white ABS for the Body.
- Dual Shaft metal gear Servo motor for Axis 1.
- Metal gear standard servo motor for axis 2,3,4.
- Metal gear mini servo for axis 5 and 6.
- Krab Board (Based of Satshakit Schematic)
- ABS (White) for 3D Printing
- Bearing of different sizes.
- Jumper cables and Header Pins.
- Machine screws.
- Hex Screws and washer.
- Servo Horns
where will they come from?
- Motor, Acrylic sheet , PLA, Screws, bearings will be bought from market and online stores.
- Crab board will be made in the lab. The board is milled and components are procured
- The Base will be CNC Milled out of MDF
- The parts of the robots will be LASER cut from acrylic and 3D printed using ABS
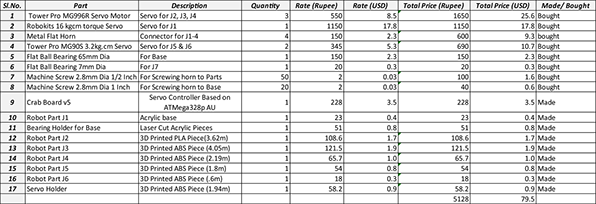
how much will it cost?
what parts and systems will be made?
- The base, body and timing pulleys will be made.
- The mechanical system will be cut and assembled.
- The control board will be made (Modified on Satshakit schematic)
what processes will be used?
- Base : CNC milling
- Robot parts: LASER Cut and 3D Printing, NURBS modelling.
- PCBs: Micro Milling and soldering, electronics design.
what tasks need to be completed?
The main IK code is ready to interface with Arduino Uno compatible board. The materials are partially procured. Design is ongoing to remove some glitches in the connection of 2nd and 3rd axis.
what questions need to be answered?
`The few questions that need to answered could be:
- What could be the complexity in the assembly of the system?
- What will be the power draw of the Six Servo and how it will be addressed?
- What is to be done to make it work seamlessly with Grasshopper?
what is the schedule?
29/5 - 31/5: Sketch | Material Procurement
1/6-5/6 : Design and Fabrication Drawing
6/6 - 8/6 : Fabrication
9/6 - 11/6 : Assembly and Electronics
12/6 - 14/6 : Finishing up and Documentation
how will it be evaluated?
It should be evaluated by its movements based on the geometry fed from the grasshopper.
The smooth motion and its ability to represent an actual robotic arm should be another criteria.
go to WEEK 18 >>
Avishek Das | 2017 | FabLab CEPT