MR.ROB-BERTO
(4-axis Robotic Arm)
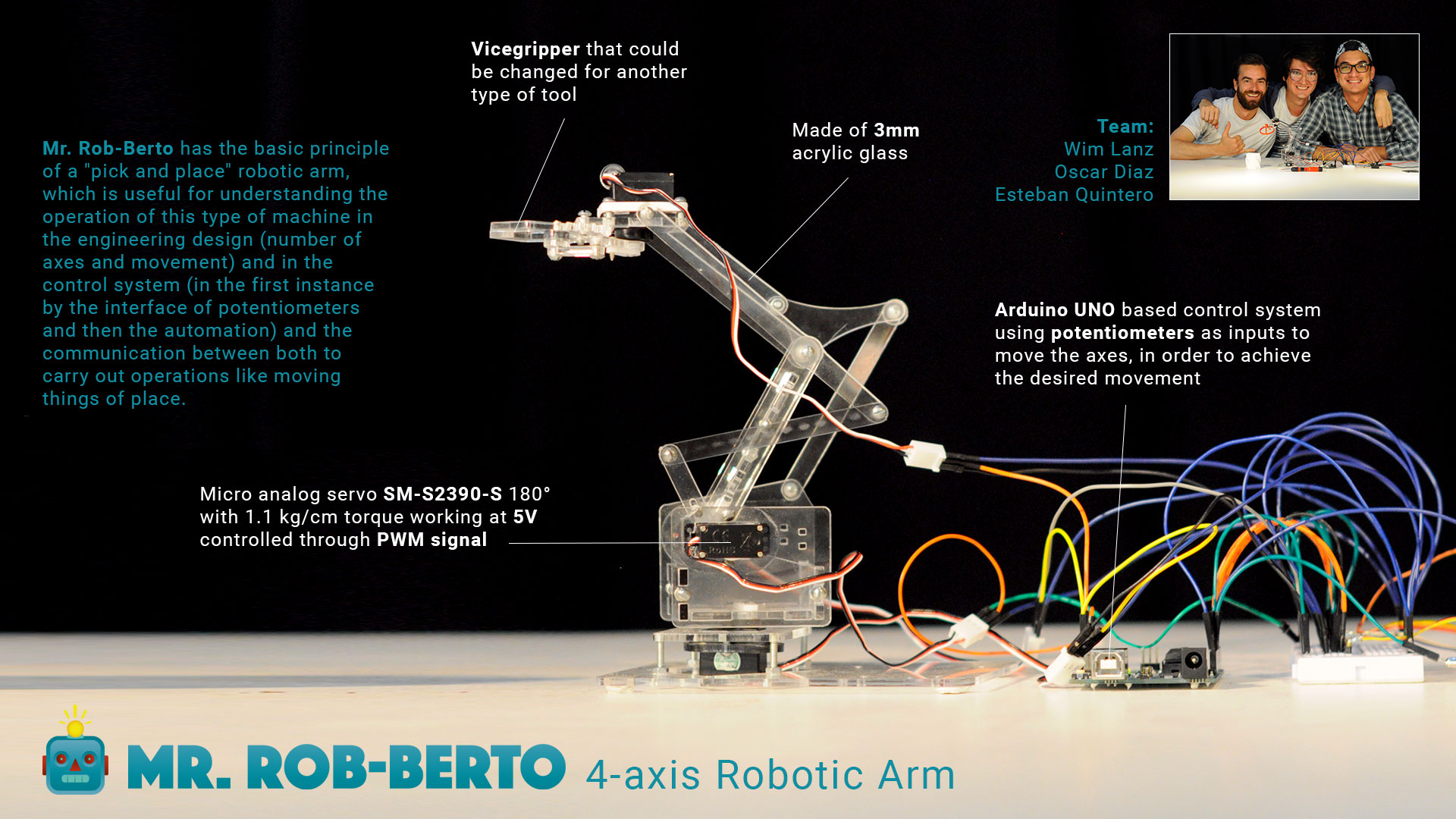
Documentation about our Group Assignment in the FabLab Barcelona. Mr. Rob-Berto has the basic principle of a "pick and place" robotic arm, which is useful for understanding the operation of this type of machine in the engineering design (number of axes and movement) and in the control system (in the first instance by the interface of potentiometers and then the automation) and the communication between both to carry out operations like moving things of place.